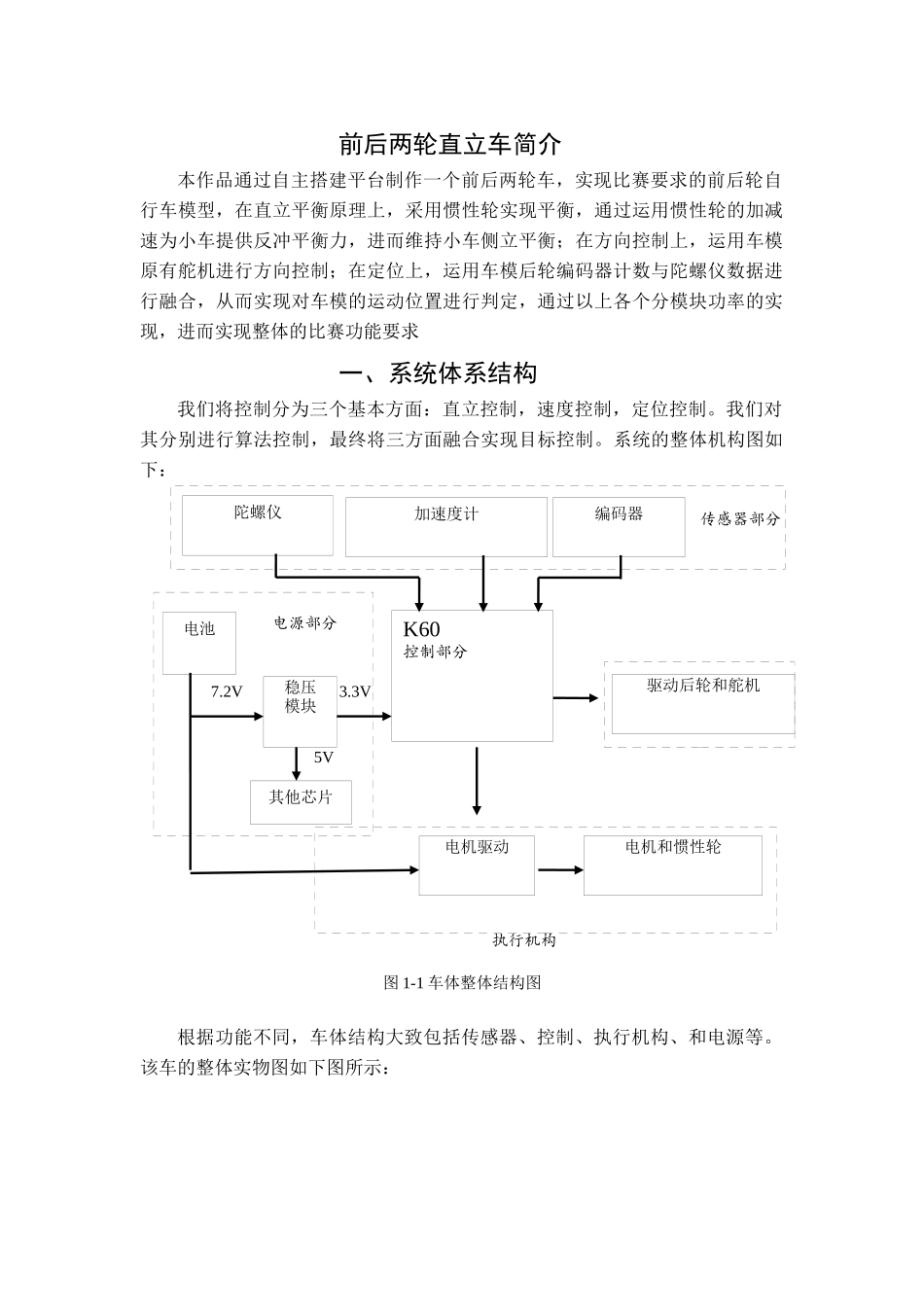
第十届“飞思卡尔”杯全国大学生智能汽车竞赛--创意赛技术报告学校:上海应用技术学院队伍名称:SIT创意1队参赛队员:刘飞鹏郭永江李圣皓贾瑞指导教师:龚德利K60控制部分加速度计编码器电池7.2V稳压模块传感器部分电源部分电机驱动执行机构3.3V陀螺仪其他芯片5V电机和惯性轮驱动后轮和舵机前后两轮直立车简介本作品通过自主搭建平台制作一个前后两轮车,实现比赛要求的前后轮自行车模型,在直立平衡原理上,采用惯性轮实现平衡,通过运用惯性轮的加减速为小车提供反冲平衡力,进而维持小车侧立平衡;在方向控制上,运用车模原有舵机进行方向控制;在定位上,运用车模后轮编码器计数与陀螺仪数据进行融合,从而实现对车模的运动位置进行判定,通过以上各个分模块功率的实现,进而实现整体的比赛功能要求一、系统体系结构我们将控制分为三个基本方面:直立控制,速度控制,定位控制。我们对其分别进行算法控制,最终将三方面融合实现目标控制。系统的整体机构图如下:图1-1车体整体结构图根据功能不同,车体结构大致包括传感器、控制、执行机构、和电源等。该车的整体实物图如下图所示:图1-2车辆的整体实物图同时,我们准备了一个备用方案车,该车通过舵机调节重心来维持平衡,通过调节重物位置来调节整车的重心位置,图1-3所示二、系统硬件设计硬件设计是整个系统的基础,只有搭建好了稳定可靠的硬件环境,才能为后续的软件提供帮助,同时硬件设计也能为软件算法提供一种补偿作用,所以说好的硬件设计是系统最初设计的关键。2.1加速度计和陀螺仪2.1.1加速度计加速度传感器可以测量由地球引力作用或者物体运动所产生的加速度。竞赛规则规定如果车模使用加速度传感器必须使用飞思卡尔公司产生的加速度传感器。该系列的传感器采用了半导体表面微机械加工和集成电路技术,传感器体积小,重量轻。由于加速度使得机械悬臂与两个电极之间的距离发生变化,从而改变了两个电容的参数。通过集成的开关电容放大电路量测电容参数的变化,形成了与加速度成正比的电压输出。MMA7260是一款三轴低g半导体加速度计,可以同时输出三个方向上的加速度模拟信号。通过设置可以使得MMA7260各轴信号最大输出灵敏度为800mV/g,这个信号无需要在进行放大,直接可以送到单片机进行AD转换。图2-1MMA7260三轴加速度传感器只需要测量其中一个方向上的加速度值,就可以计算出车模倾角,比如使用Z轴方向上的加速度信号。车模直立时,固定加速度器在Z轴水平方向,此时输出信号为零...