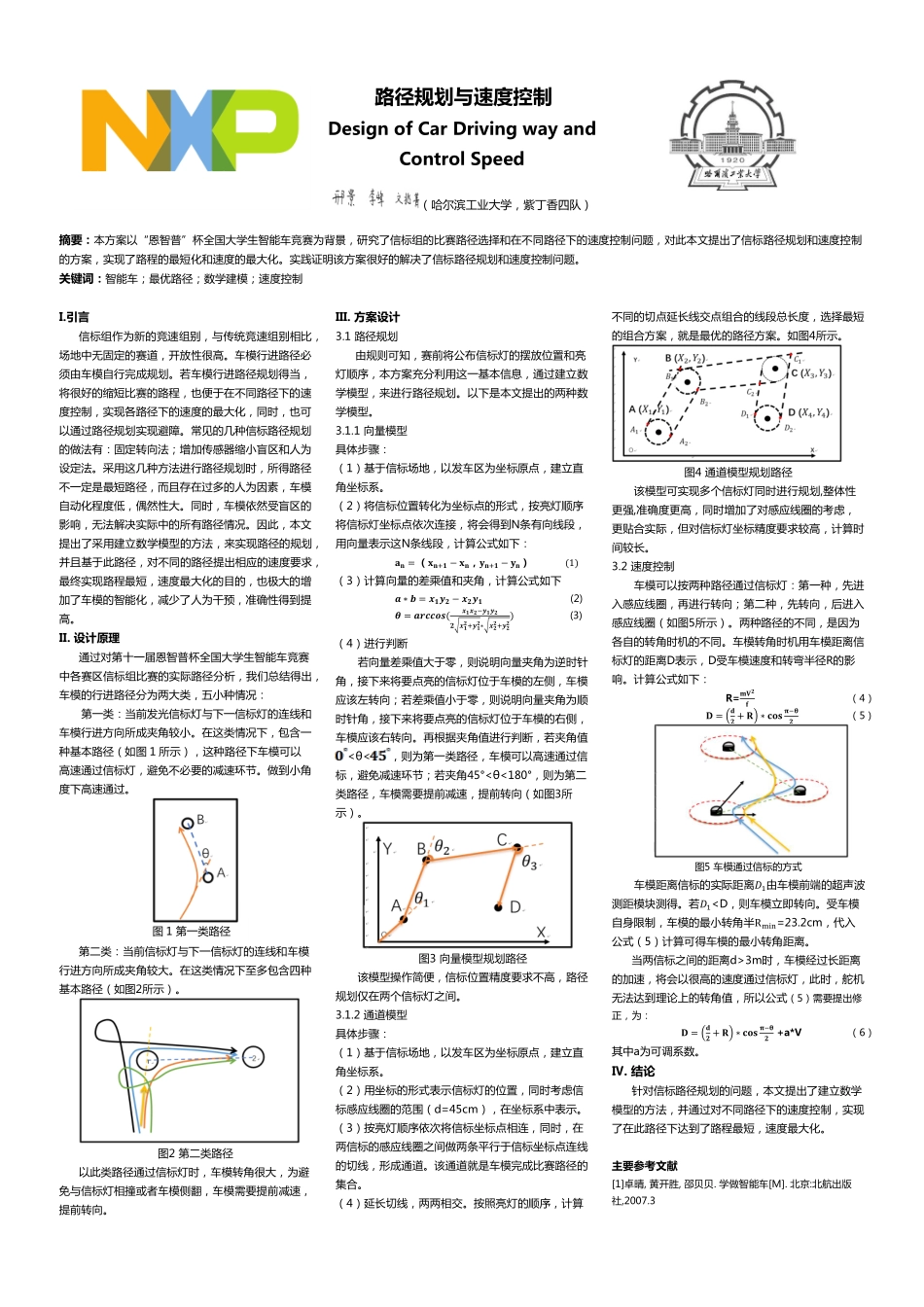
图1第一类路径路径规划与速度控制DesignofCarDrivingwayandControlSpeed(哈尔滨工业大学,紫丁香四队)摘要:本方案以“恩智普”杯全国大学生智能车竞赛为背景,研究了信标组的比赛路径选择和在不同路径下的速度控制问题,对此本文提出了信标路径规划和速度控制的方案,实现了路程的最短化和速度的最大化。实践证明该方案很好的解决了信标路径规划和速度控制问题。关键词:智能车;最优路径;数学建模;速度控制I.引言信标组作为新的竞速组别,与传统竞速组别相比,场地中无固定的赛道,开放性很高。车模行进路径必须由车模自行完成规划。若车模行进路径规划得当,将很好的缩短比赛的路程,也便于在不同路径下的速度控制,实现各路径下的速度的最大化,同时,也可以通过路径规划实现避障。常见的几种信标路径规划的做法有:固定转向法;增加传感器缩小盲区和人为设定法。采用这几种方法进行路径规划时,所得路径不一定是最短路径,而且存在过多的人为因素,车模自动化程度低,偶然性大。同时,车模依然受盲区的影响,无法解决实际中的所有路径情况。因此,本文提出了采用建立数学模型的方法,来实现路径的规划,并且基于此路径,对不同的路径提出相应的速度要求,最终实现路程最短,速度最大化的目的,也极大的增加了车模的智能化,减少了人为干预,准确性得到提高。II.设计原理通过对第十一届恩智普杯全国大学生智能车竞赛中各赛区信标组比赛的实际路径分析,我们总结得出,车模的行进路径分为两大类,五小种情况:第一类:当前发光信标灯与下一信标灯的连线和车模行进方向所成夹角较小。在这类情况下,包含一种基本路径(如图1所示),这种路径下车模可以高速通过信标灯,避免不必要的减速环节。做到小角度下高速通过。第二类:当前信标灯与下一信标灯的连线和车模行进方向所成夹角较大。在这类情况下至多包含四种基本路径(如图2所示)。图2第二类路径以此类路径通过信标灯时,车模转角很大,为避免与信标灯相撞或者车模侧翻,车模需要提前减速,提前转向。III.方案设计3.1路径规划由规则可知,赛前将公布信标灯的摆放位置和亮灯顺序,本方案充分利用这一基本信息,通过建立数学模型,来进行路径规划。以下是本文提出的两种数学模型。3.1.1向量模型具体步骤:(1)基于信标场地,以发车区为坐标原点,建立直角坐标系。(2)将信标位置转化为坐标点的形式,按亮灯顺序将信标灯坐标点依次连接,将会得到N条有向线段,用向量表示这N条线段,计算公...