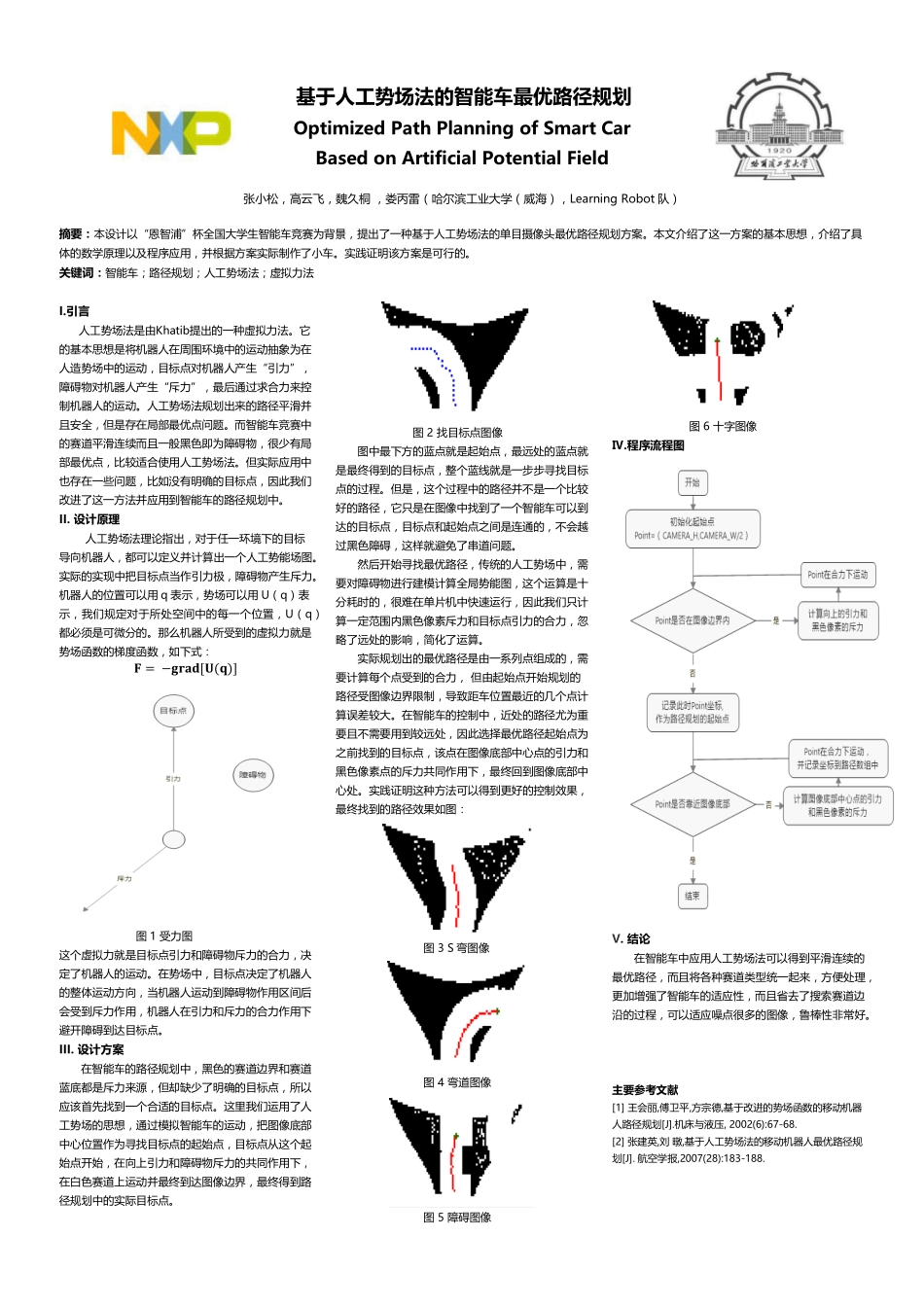
基于人工势场法的智能车最优路径规划OptimizedPathPlanningofSmartCarBasedonArtificialPotentialField张小松,高云飞,魏久桐,娄丙雷(哈尔滨工业大学(威海),LearningRobot队)摘要:本设计以“恩智浦”杯全国大学生智能车竞赛为背景,提出了一种基于人工势场法的单目摄像头最优路径规划方案。本文介绍了这一方案的基本思想,介绍了具体的数学原理以及程序应用,并根据方案实际制作了小车。实践证明该方案是可行的。关键词:智能车;路径规划;人工势场法;虚拟力法I.引言人工势场法是由Khatib提出的一种虚拟力法。它的基本思想是将机器人在周围环境中的运动抽象为在人造势场中的运动,目标点对机器人产生“引力”,障碍物对机器人产生“斥力”,最后通过求合力来控制机器人的运动。人工势场法规划出来的路径平滑并且安全,但是存在局部最优点问题。而智能车竞赛中的赛道平滑连续而且一般黑色即为障碍物,很少有局部最优点,比较适合使用人工势场法。但实际应用中也存在一些问题,比如没有明确的目标点,因此我们改进了这一方法并应用到智能车的路径规划中。II.设计原理人工势场法理论指出,对于任一环境下的目标导向机器人,都可以定义并计算出一个人工势能场图。实际的实现中把目标点当作引力极,障碍物产生斥力。机器人的位置可以用q表示,势场可以用U(q)表示,我们规定对于所处空间中的每一个位置,U(q)都必须是可微分的。那么机器人所受到的虚拟力就是势场函数的梯度函数,如下式:𝐅=−𝐠𝐫𝐚𝐝[𝐔(𝐪)]图1受力图这个虚拟力就是目标点引力和障碍物斥力的合力,决定了机器人的运动。在势场中,目标点决定了机器人的整体运动方向,当机器人运动到障碍物作用区间后会受到斥力作用,机器人在引力和斥力的合力作用下避开障碍到达目标点。III.设计方案在智能车的路径规划中,黑色的赛道边界和赛道蓝底都是斥力来源,但却缺少了明确的目标点,所以应该首先找到一个合适的目标点。这里我们运用了人工势场的思想,通过模拟智能车的运动,把图像底部中心位置作为寻找目标点的起始点,目标点从这个起始点开始,在向上引力和障碍物斥力的共同作用下,在白色赛道上运动并最终到达图像边界,最终得到路径规划中的实际目标点。图2找目标点图像图中最下方的蓝点就是起始点,最远处的蓝点就是最终得到的目标点,整个蓝线就是一步步寻找目标点的过程。但是,这个过程中的路径并不是一个比较好的路径,它只是在图像中找到了一个智能车可以到达的目标点...