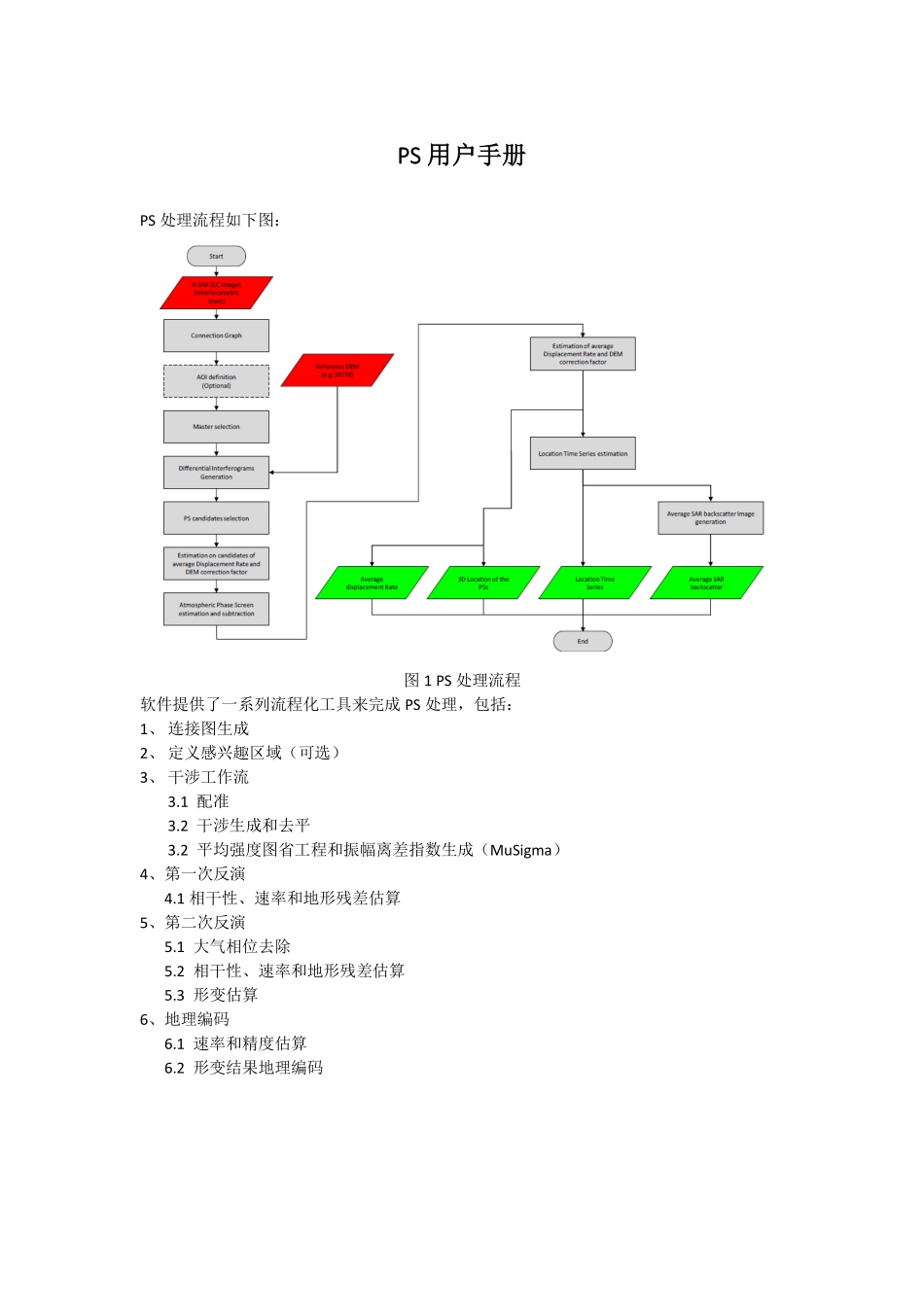
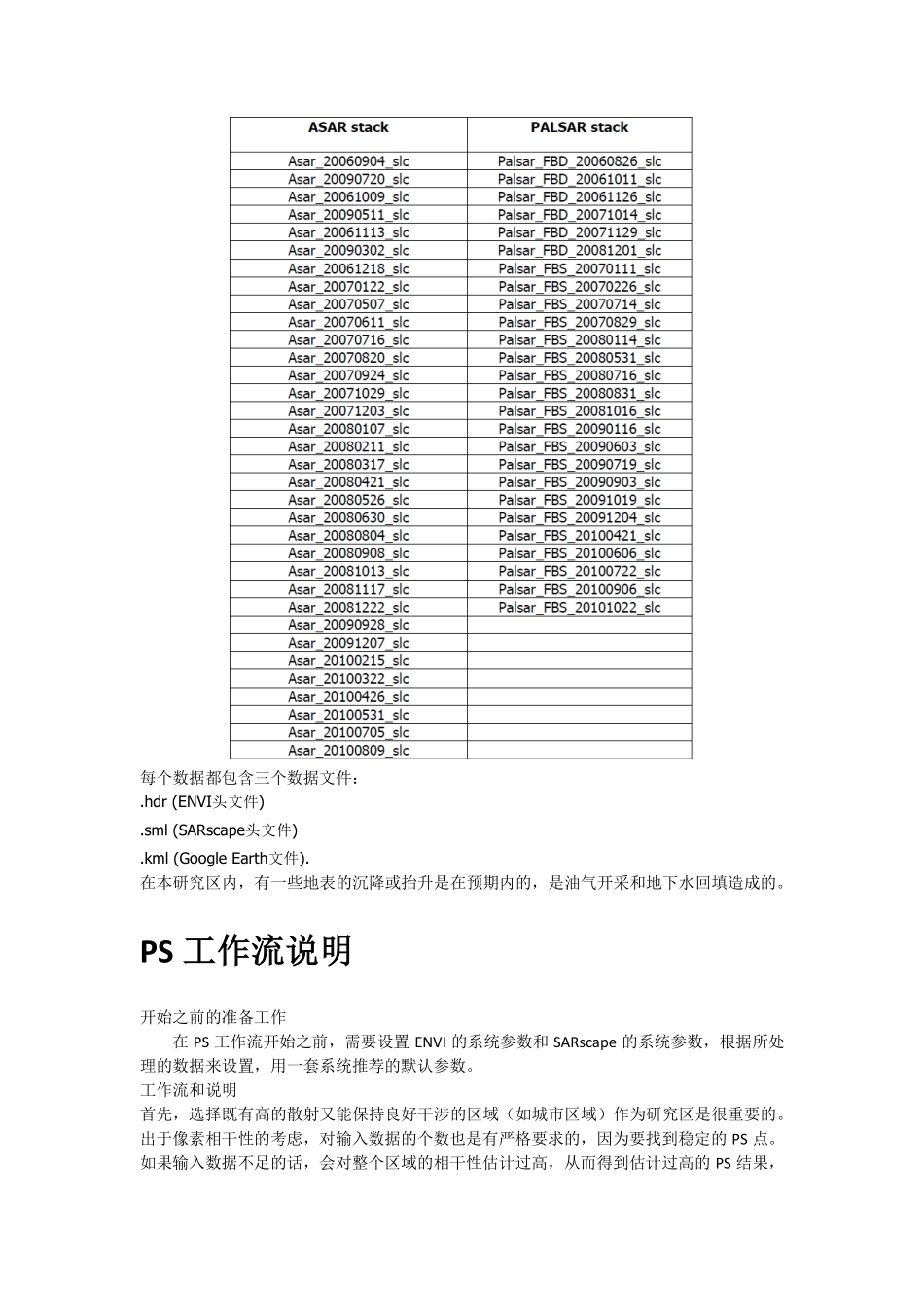
PS用户手册PS处理流程如下图:图1PS处理流程软件提供了一系列流程化工具来完成PS处理,包括:1、连接图生成2、定义感兴趣区域(可选)3、干涉工作流3.1配准3.2干涉生成和去平3.2平均强度图省工程和振幅离差指数生成(MuSigma)4、第一次反演4.1相干性、速率和地形残差估算5、第二次反演5.1大气相位去除5.2相干性、速率和地形残差估算5.3形变估算6、地理编码6.1速率和精度估算6.2形变结果地理编码研究区和数据说明本文档对PS处理进行详细的说明,用户可以参考本文档进行自己的数据处理。文中大多数截图都是来自两组数据,软件版本是SARscape5.1+ENVI5.2,有一些特殊的情况,为了提高显示速度,用到了ENVIClassic。研究区是日本莆安市,在离东京不远的千叶市,用到了两组数据集:ENVISAT-ASAR和ALOS-PALSAR,时间空间覆盖相似,便于对比结果,还有GPS测量数据,用来验证PS的结果。ASAR数据集包含34景降轨数据,IS2模式,VV极化,时间从2006年8月26日到2010年10月22日。PALSAR数据集包含23景降轨数据,单极化或双极化(FBS-FBD)模式,HH极化方式,时间从2006年9月4日到2010年8月9日。两组数据是同一个区域的,不同波长、不同传感器、不同入射角,得到的结果很相近,那么说明结果是很接近真实情况的。本文在处理的时候,两个数据集同时处理的,在实际工作中,建议一次性处理一个数据集。图2ASAR数据集区域(红色)和PALSAR数据集区域(蓝色)两个数据集的时相如下表所示:每个数据都包含三个数据文件:.hdr(ENVI头文件).sml(SARscape头文件).kml(GoogleEarth文件).在本研究区内,有一些地表的沉降或抬升是在预期内的,是油气开采和地下水回填造成的。PS工作流说明开始之前的准备工作在PS工作流开始之前,需要设置ENVI的系统参数和SARscape的系统参数,根据所处理的数据来设置,用一套系统推荐的默认参数。工作流和说明首先,选择既有高的散射又能保持良好干涉的区域(如城市区域)作为研究区是很重要的。出于像素相干性的考虑,对输入数据的个数也是有严格要求的,因为要找到稳定的PS点。如果输入数据不足的话,会对整个区域的相干性估计过高,从而得到估计过高的PS结果,得到错误的形变结果。PS要求至少是20景输入数据。在做干涉的时候,所有数据都匹配到主影像上,利用DEM去平,转换到主影像坐标系。在有精确轨道文件和精确的参考DEM文件,程序是完全自动运行的。如果在卫星轨道或参考DEM的地理位置有误差,需要用几何地面控制点-“GeometryGCPffile...