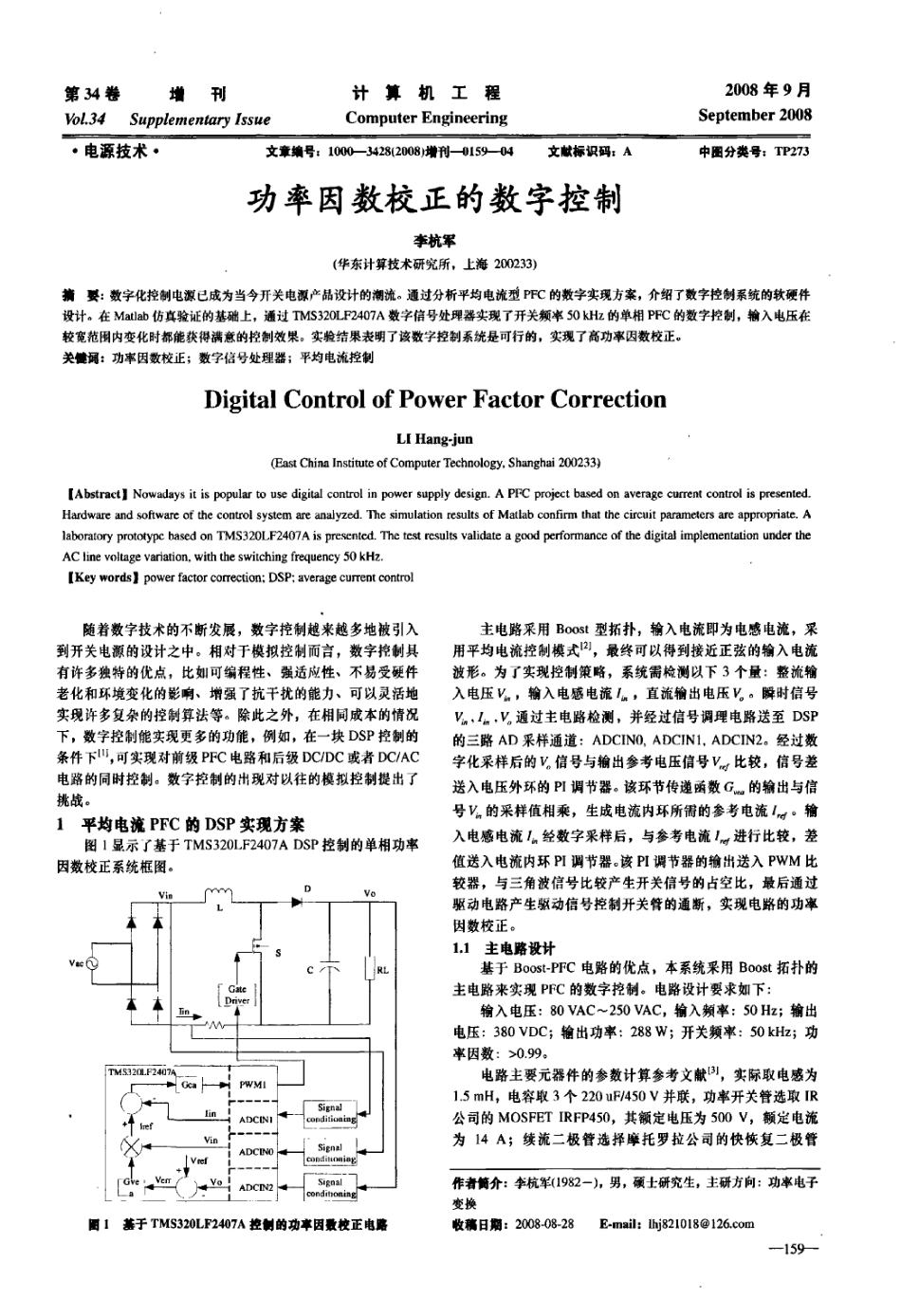
第34卷增刊V01.34SupplementaryIssue计算机工程ComputerEn画neering2008年9月September2008·电源技术·文章缩号tlooo一3428(20惦J增刊—0159—咐文献标识码:A中圈分类号:TP273功率因数校正的数字控制李杭军(华东计算技术研究所,上海200233)摘要:数字化控制电源已成为当今开关电源产品设计的潮流。通过分析平均电流型PFC的数字实现方案,介绍了数字控制系统的软硬件设计。在Matlab仿真验证的基础上,通过TMS320LF2407A数字信号处理器实现了开关频率50kHz的单相PFC的数字控制,输入电压在较宽范围内变化时都能获得满意的控制效果。实验结果表明了该数字控制系统是可行的,实现了高功率因数校正。关健诃:功率因数校正;数字信号处理器;平均电流控制DigitalControlofPowerFactorCorrectionLIHang.jun(EastChinaInstituteofComputerTechnology,Shanghai200233)[AbstractlNowadaysitispopulartousedigitalcontrolinpowersupplydesign.APFCprojectbasedonaverageCnlTentcontrolisp㈣nted.H“dwareandsoftwareoftheconuolsystemarean',dyzed.ThesimulationresultsofMatlabconfirmthatthecircuitparametersareappropriate.AlaboratoryprototypebasedonTMS320LF2407Aispresented.Thetestresultsvalidateagoodperformanceofthedigitalimplemen"rationundertheAClinevolmgevariation。withtheswitchingfrequency50kHz.[Keywords]powerfactorcoffecdon;DSP;averagecnri℃ntcontrol随着数字技术的不断发展,数字控制越来越多地被引入到开关电源的设计之中。相对于模拟控制而言,数字控制具有许多独特的优点,比如可编程性、强适应性、不易受硬件老化和环境变化的影响、增强了抗干扰的能力、可以灵活地实现许多复杂的控制算法等。除此之外,在相同成本的情况下,数字控制能实现更多的功能,例如,在一块DSP控制的条件下”J,可实现对前级PFC电路和后级DC/DC或者DC/AC电路的同时控制。数字控制的出现对以往的模拟控制提出了挑战。1平均电流PFC的DSP实现方案图1显示了基于TMS320LF2407ADSP控制的单相功率因数校正系统框图。圈1基于TMS320LF2407A控■的功事因致校正电路主电路采用Boost型拓扑,输入电流即为电感电流,采用平均电流控制模式12J,最终可以得到接近正弦的输入电流波形。为了实现控制策略,系统需检测以下3个量:整流输入电压%,输入电感电流气,直流输出电压K。瞬时信号%,乇,K通过主电路检测,并经过信号调理电路送至DSP的三路AD...