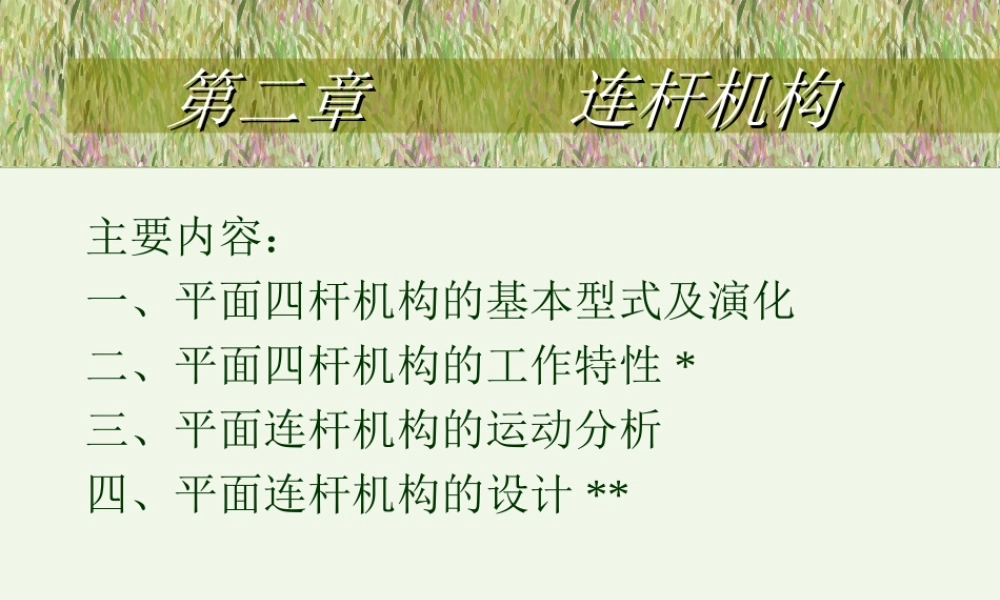
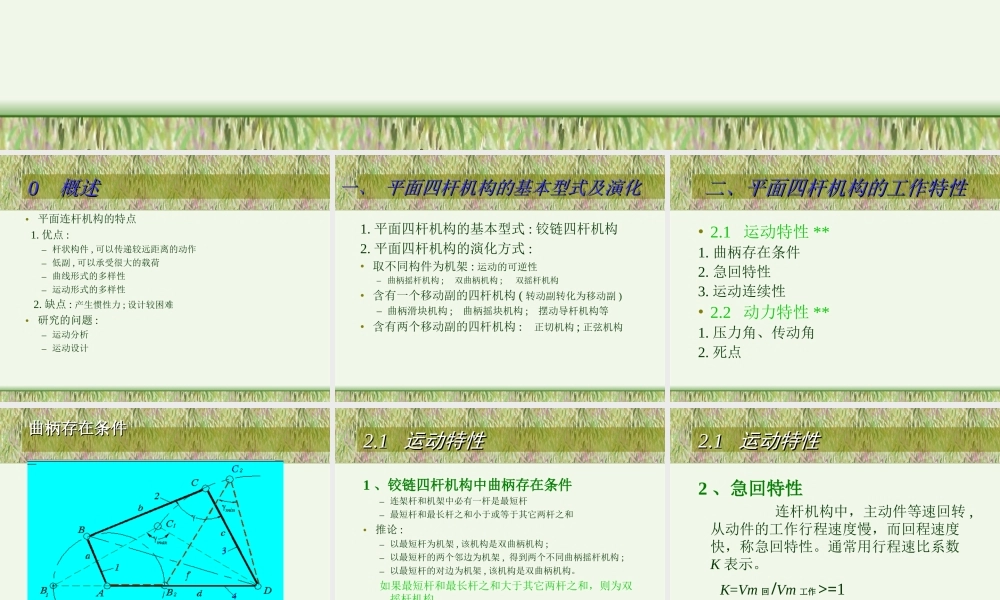
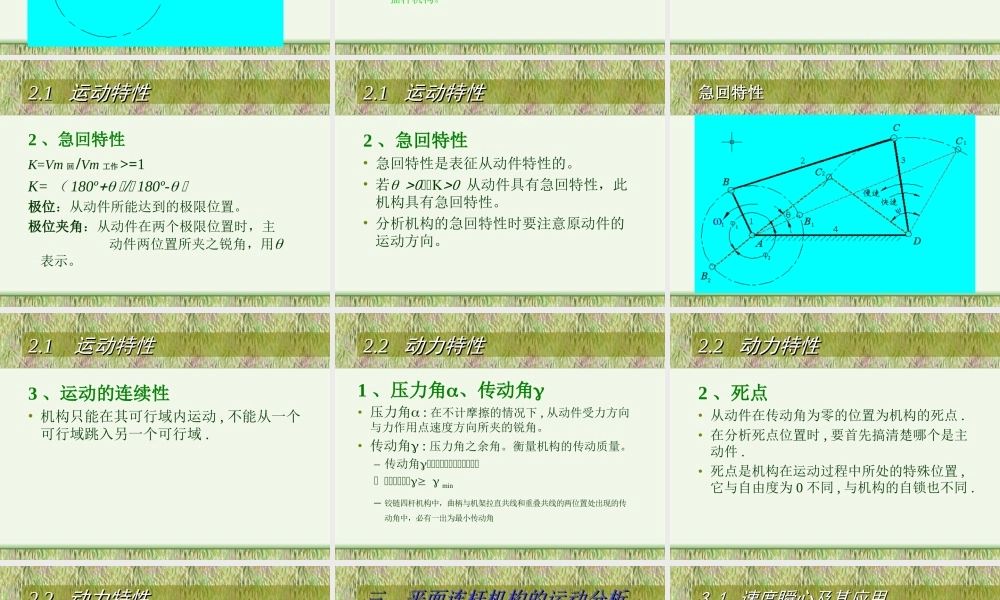
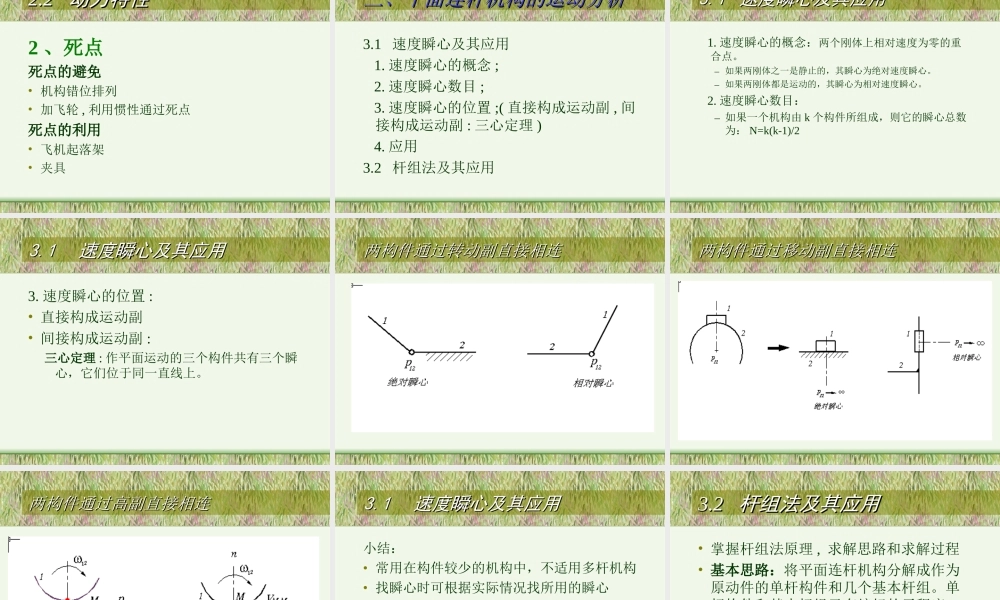
第二章连杆机构第二章连杆机构主要内容:一、平面四杆机构的基本型式及演化二、平面四杆机构的工作特性*三、平面连杆机构的运动分析四、平面连杆机构的设计**00概述概述•平面连杆机构的特点1.优点:–杆状构件,可以传递较远距离的动作–低副,可以承受很大的载荷–曲线形式的多样性–运动形式的多样性2.缺点:产生惯性力;设计较困难•研究的问题:–运动分析–运动设计一、平面四杆机构的基本型式及演化一、平面四杆机构的基本型式及演化1.平面四杆机构的基本型式:铰链四杆机构2.平面四杆机构的演化方式:•取不同构件为机架:运动的可逆性–曲柄摇杆机构;双曲柄机构;双摇杆机构•含有一个移动副的四杆机构(转动副转化为移动副)–曲柄滑块机构;曲柄摇块机构;摆动导杆机构等•含有两个移动副的四杆机构:正切机构;正弦机构二、平面四杆机构的工作特性二、平面四杆机构的工作特性•2.1运动特性**1.曲柄存在条件2.急回特性3.运动连续性•2.2动力特性**1.压力角、传动角2.死点曲柄存在条件曲柄存在条件2.12.1运动特性运动特性1、铰链四杆机构中曲柄存在条件–连架杆和机架中必有一杆是最短杆–最短杆和最长杆之和小于或等于其它两杆之和•推论:–以最短杆为机架,该机构是双曲柄机构;–以最短杆的两个邻边为机架,得到两个不同曲柄摇杆机构;–以最短杆的对边为机架,该机构是双曲柄机构。如果最短杆和最长杆之和大于其它两杆之和,则为双摇杆机构。2.12.1运动特性运动特性2、急回特性连杆机构中,主动件等速回转,从动件的工作行程速度慢,而回程速度快,称急回特性。通常用行程速比系数K表示。K=Vm回/Vm工作>=12.12.1运动特性运动特性2、急回特性K=Vm回/Vm工作>=1K=(180º))180º-)极位:从动件所能达到的极限位置。极位夹角:从动件在两个极限位置时,主动件两位置所夹之锐角,用表示。2.12.1运动特性运动特性2、急回特性•急回特性是表征从动件特性的。•若))从动件具有急回特性,此机构具有急回特性。•分析机构的急回特性时要注意原动件的运动方向。急回特性急回特性2.12.1运动特性运动特性3、运动的连续性•机构只能在其可行域内运动,不能从一个可行域跳入另一个可行域.2.22.2动力特性动力特性1、压力角、传动角•压力角:在不计摩擦的情况下,从动件受力方向与力作用点速度方向所夹的锐角。•传动角:压力角之余角。衡量机构的传动质量。–传动角)))))))))))))))))))min–铰链四杆机...