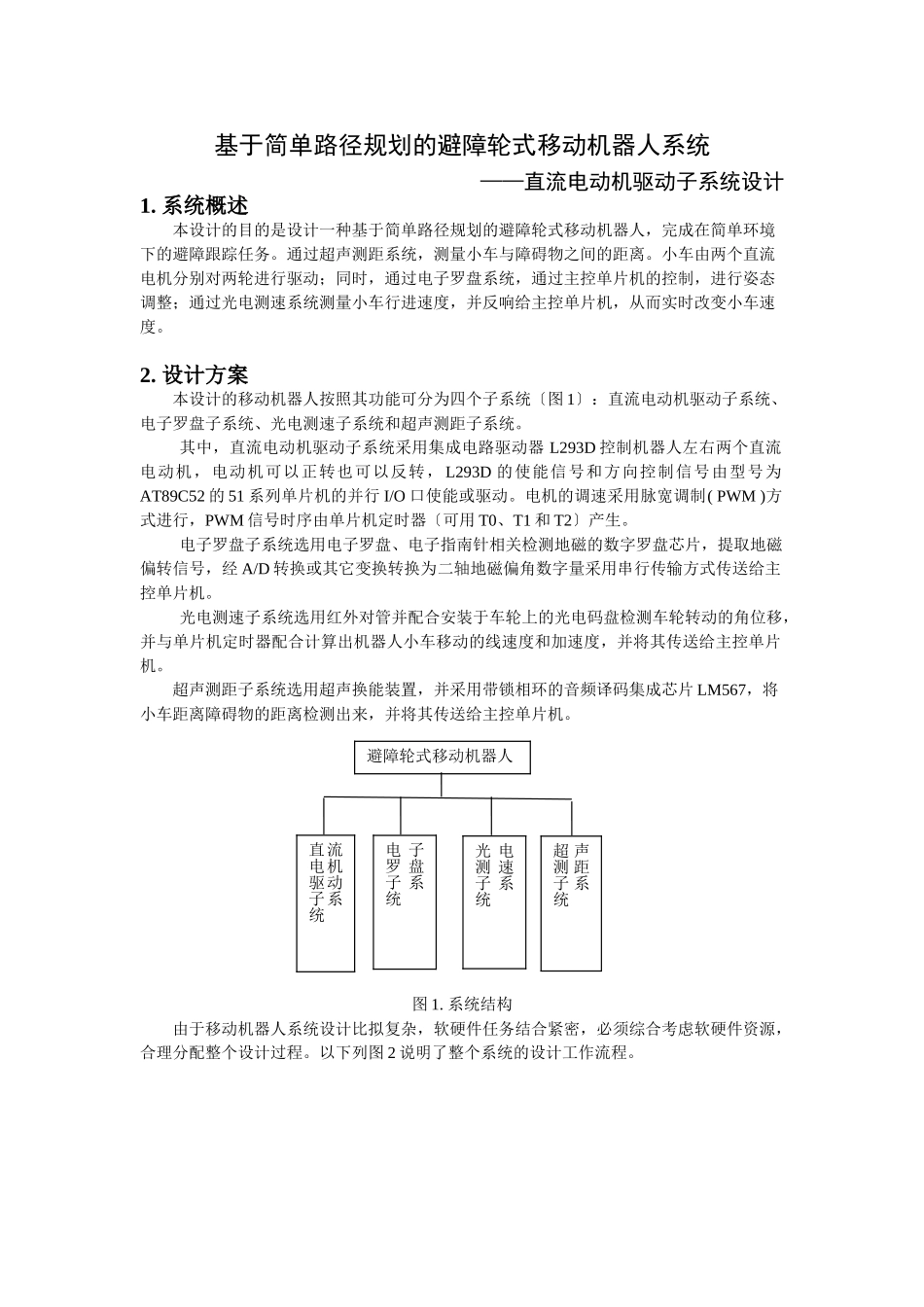
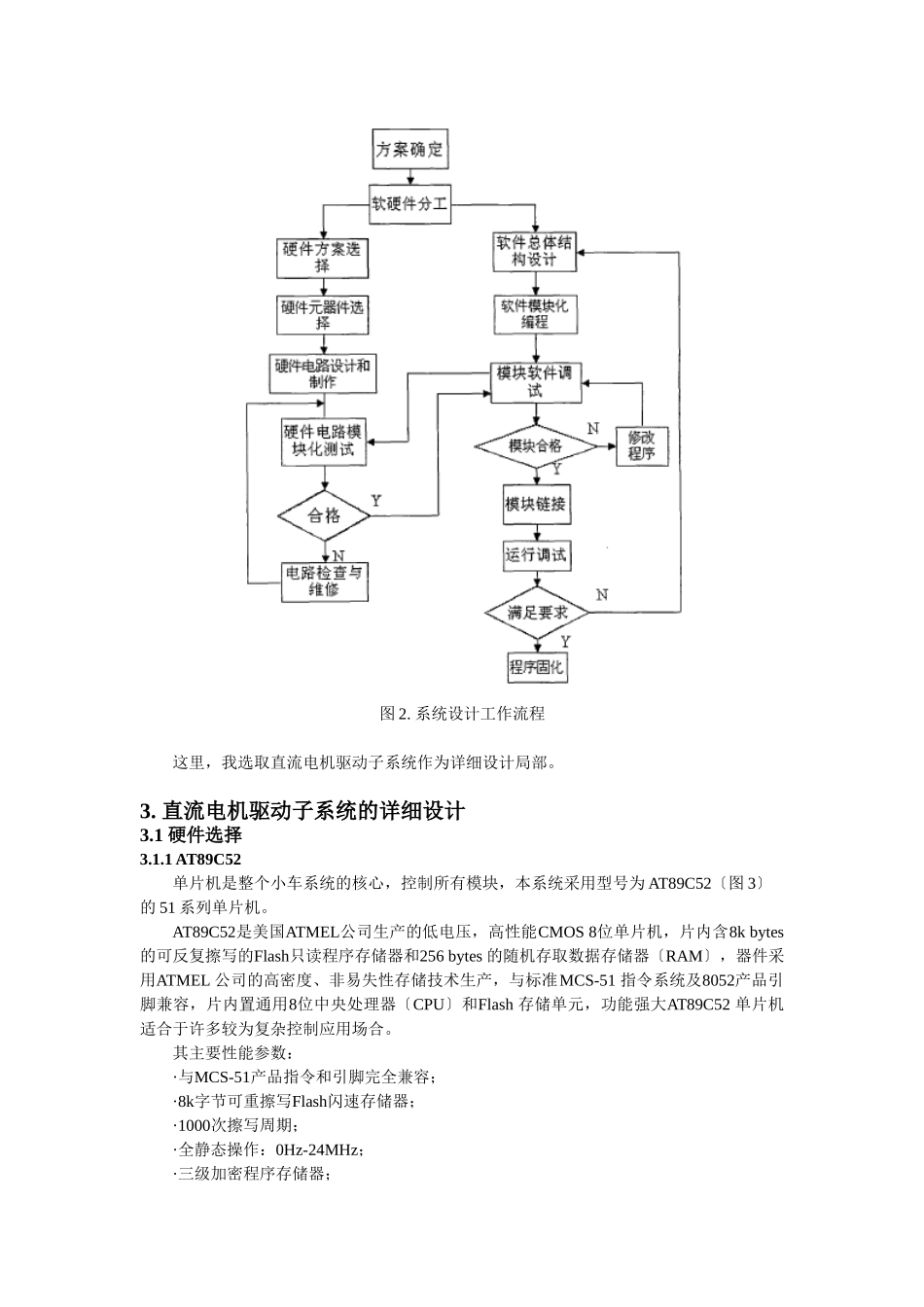
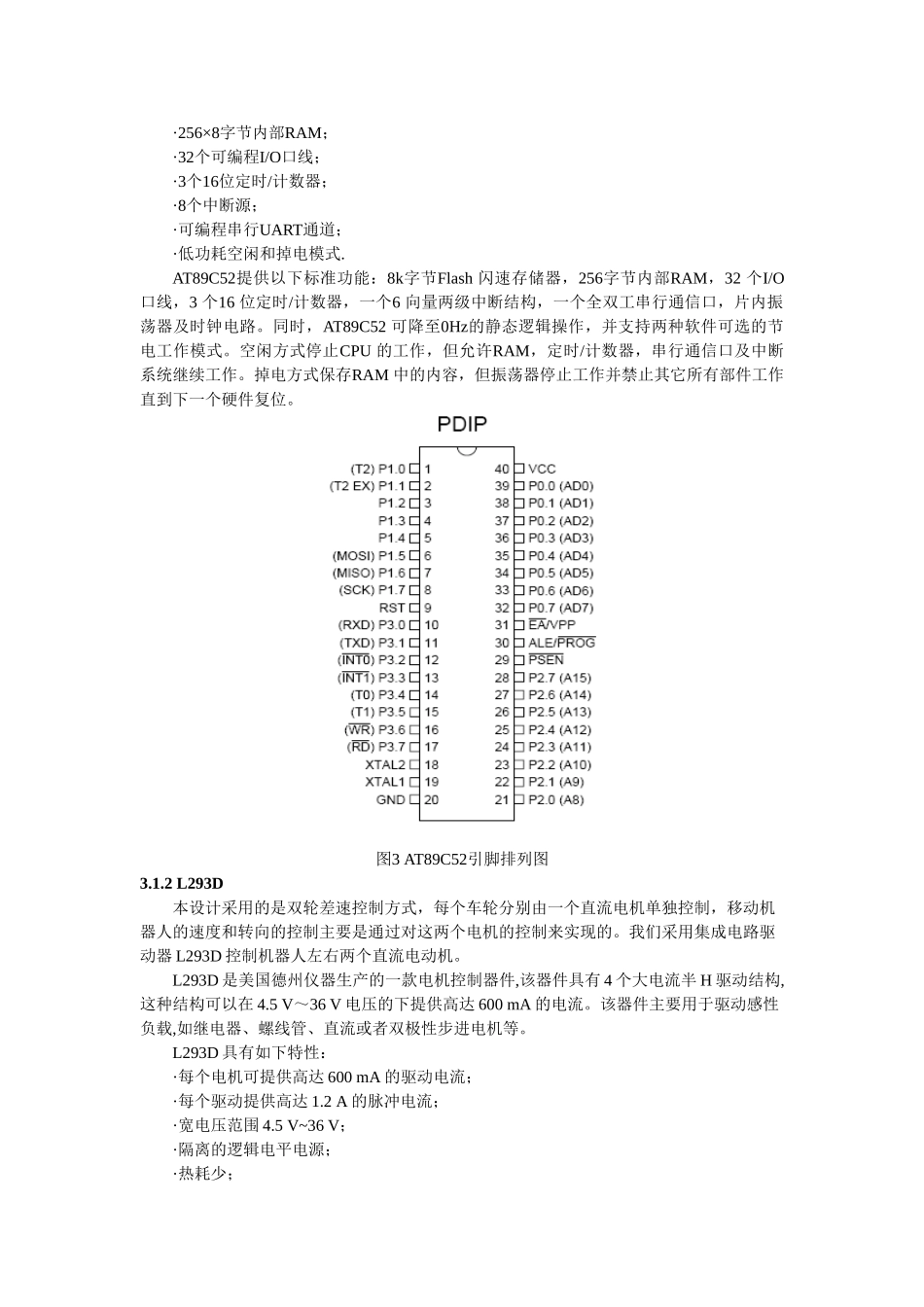
基于简单路径规划的避障轮式移动机器人系统——直流电动机驱动子系统设计1.系统概述本设计的目的是设计一种基于简单路径规划的避障轮式移动机器人,完成在简单环境下的避障跟踪任务。通过超声测距系统,测量小车与障碍物之间的距离。小车由两个直流电机分别对两轮进行驱动;同时,通过电子罗盘系统,通过主控单片机的控制,进行姿态调整;通过光电测速系统测量小车行进速度,并反响给主控单片机,从而实时改变小车速度。2.设计方案本设计的移动机器人按照其功能可分为四个子系统〔图1〕:直流电动机驱动子系统、电子罗盘子系统、光电测速子系统和超声测距子系统。其中,直流电动机驱动子系统采用集成电路驱动器L293D控制机器人左右两个直流电动机,电动机可以正转也可以反转,L293D的使能信号和方向控制信号由型号为AT89C52的51系列单片机的并行I/O口使能或驱动。电机的调速采用脉宽调制(PWM)方式进行,PWM信号时序由单片机定时器〔可用T0、T1和T2〕产生。电子罗盘子系统选用电子罗盘、电子指南针相关检测地磁的数字罗盘芯片,提取地磁偏转信号,经A/D转换或其它变换转换为二轴地磁偏角数字量采用串行传输方式传送给主控单片机。光电测速子系统选用红外对管并配合安装于车轮上的光电码盘检测车轮转动的角位移,并与单片机定时器配合计算出机器人小车移动的线速度和加速度,并将其传送给主控单片机。超声测距子系统选用超声换能装置,并采用带锁相环的音频译码集成芯片LM567,将小车距离障碍物的距离检测出来,并将其传送给主控单片机。图1.系统结构由于移动机器人系统设计比拟复杂,软硬件任务结合紧密,必须综合考虑软硬件资源,合理分配整个设计过程。以下列图2说明了整个系统的设计工作流程。避障轮式移动机器人直流电机驱动子系统电子罗盘子系统光电测速子系统超声测距子系统图2.系统设计工作流程这里,我选取直流电机驱动子系统作为详细设计局部。3.直流电机驱动子系统的详细设计3.1硬件选择3.1.1AT89C52单片机是整个小车系统的核心,控制所有模块,本系统采用型号为AT89C52〔图3〕的51系列单片机。AT89C52是美国ATMEL公司生产的低电压,高性能CMOS8位单片机,片内含8kbytes的可反复擦写的Flash只读程序存储器和256bytes的随机存取数据存储器〔RAM〕,器件采用ATMEL公司的高密度、非易失性存储技术生产,与标准MCS-51指令系统及8052产品引脚兼容,片内置通用8位中央处理器〔CPU〕和Flash存储单元,功能强大AT89C52单片机适合于许多较为复杂控...