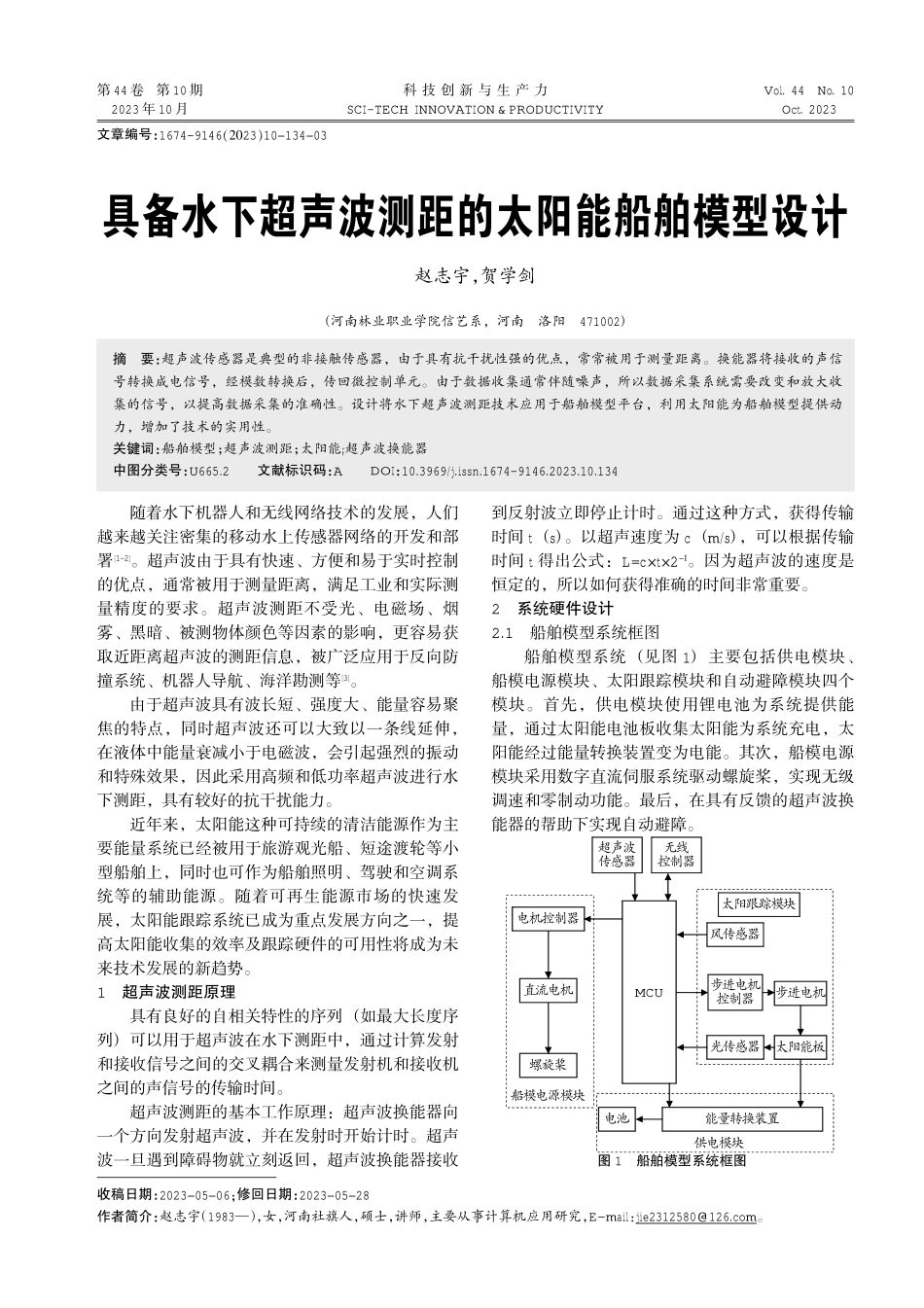
科技创新与生产力2023年第44卷第10期随着水下机器人和无线网络技术的发展,人们越来越关注密集的移动水上传感器网络的开发和部署[1-2]。超声波由于具有快速、方便和易于实时控制的优点,通常被用于测量距离,满足工业和实际测量精度的要求。超声波测距不受光、电磁场、烟雾、黑暗、被测物体颜色等因素的影响,更容易获取近距离超声波的测距信息,被广泛应用于反向防撞系统、机器人导航、海洋勘测等[3]。由于超声波具有波长短、强度大、能量容易聚焦的特点,同时超声波还可以大致以一条线延伸,在液体中能量衰减小于电磁波,会引起强烈的振动和特殊效果,因此采用高频和低功率超声波进行水下测距,具有较好的抗干扰能力。近年来,太阳能这种可持续的清洁能源作为主要能量系统已经被用于旅游观光船、短途渡轮等小型船舶上,同时也可作为船舶照明、驾驶和空调系统等的辅助能源。随着可再生能源市场的快速发展,太阳能跟踪系统已成为重点发展方向之一,提高太阳能收集的效率及跟踪硬件的可用性将成为未来技术发展的新趋势。1超声波测距原理具有良好的自相关特性的序列(如最大长度序列)可以用于超声波在水下测距中,通过计算发射和接收信号之间的交叉耦合来测量发射机和接收机之间的声信号的传输时间。超声波测距的基本工作原理:超声波换能器向一个方向发射超声波,并在发射时开始计时。超声波一旦遇到障碍物就立刻返回,超声波换能器接收到反射波立即停止计时。通过这种方式,获得传输时间t(s)。以超声速度为c(m/s),可以根据传输时间t得出公式:L=c伊t伊2原员。因为超声波的速度是恒定的,所以如何获得准确的时间非常重要。2系统硬件设计2.1船舶模型系统框图船舶模型系统(见图1)主要包括供电模块、船模电源模块、太阳跟踪模块和自动避障模块四个模块。首先,供电模块使用锂电池为系统提供能量,通过太阳能电池板收集太阳能为系统充电,太阳能经过能量转换装置变为电能。其次,船模电源模块采用数字直流伺服系统驱动螺旋桨,实现无级调速和零制动功能。最后,在具有反馈的超声波换能器的帮助下实现自动避障。收稿日期:2023原05原06曰修回日期:2023原05原28作者简介:赵志宇(1983—),女,河南社旗人,硕士,讲师,主要从事计算机应用研究,E-mail:jie2312580@126.com。具备水下超声波测距的太阳能船舶模型设计赵志宇,贺学剑摘要:超声波传感器是典型的非接触传感器,由于具有抗干扰性强的优点,常常被用于测量距离。换能器将接收的声信...