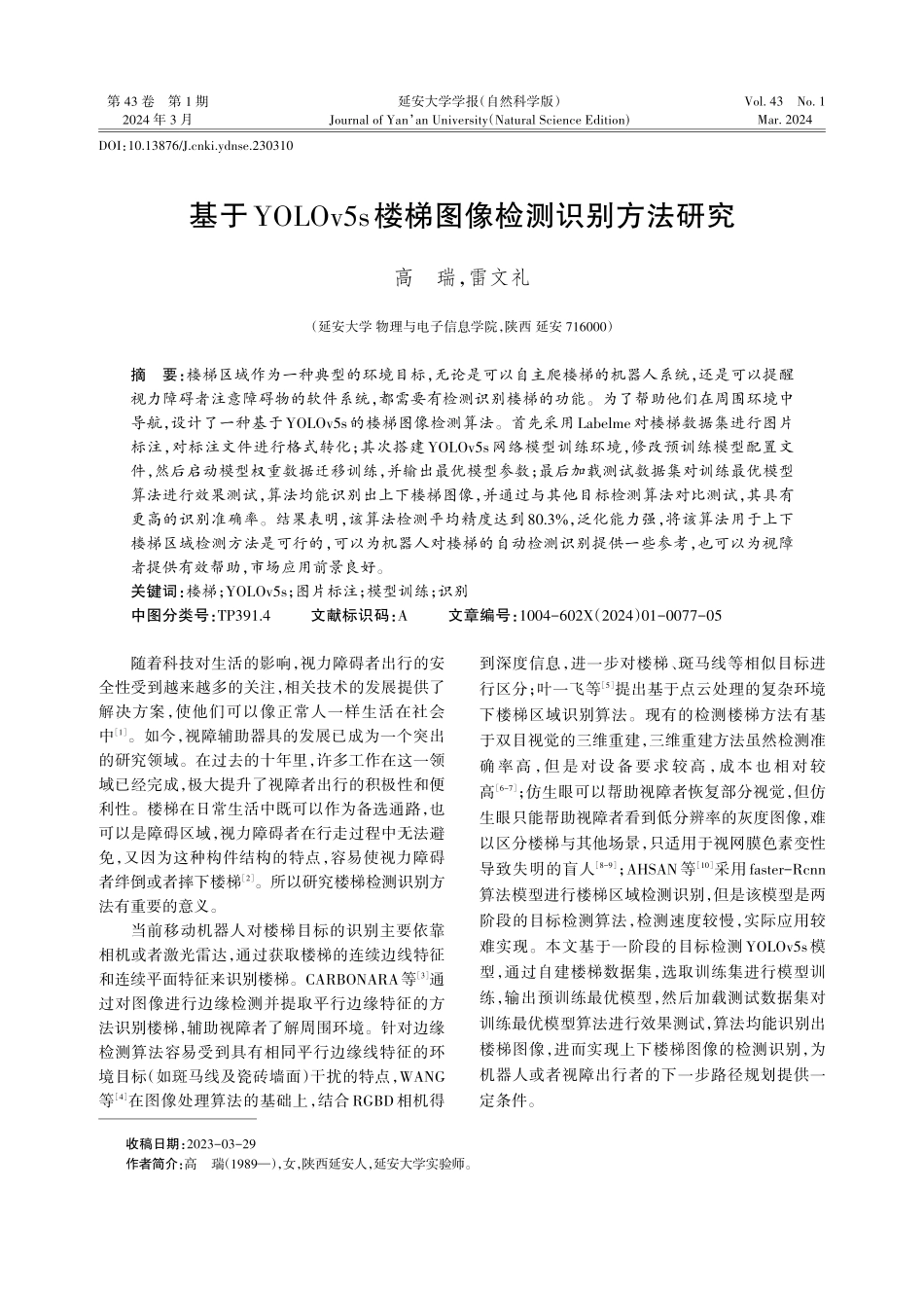
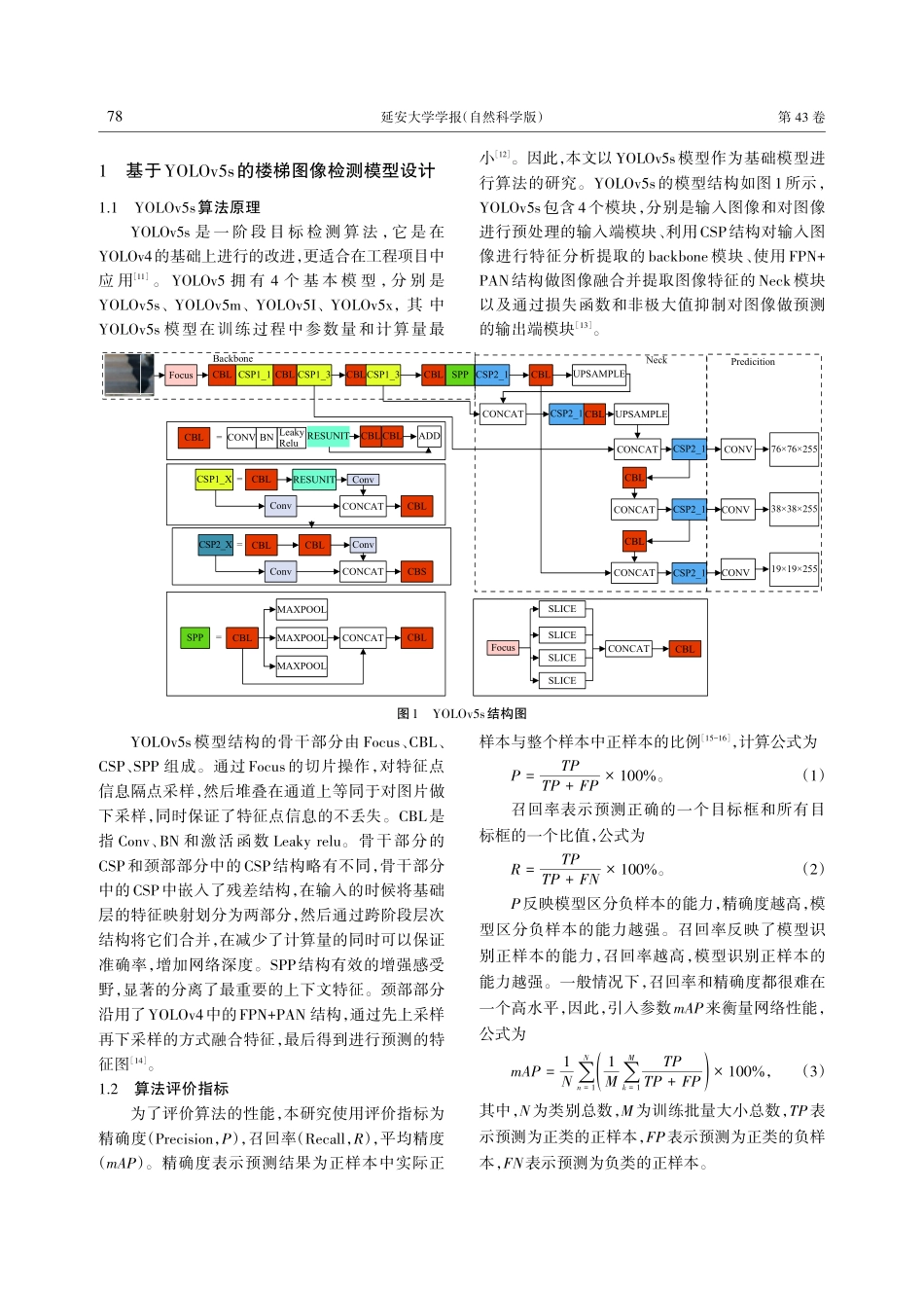
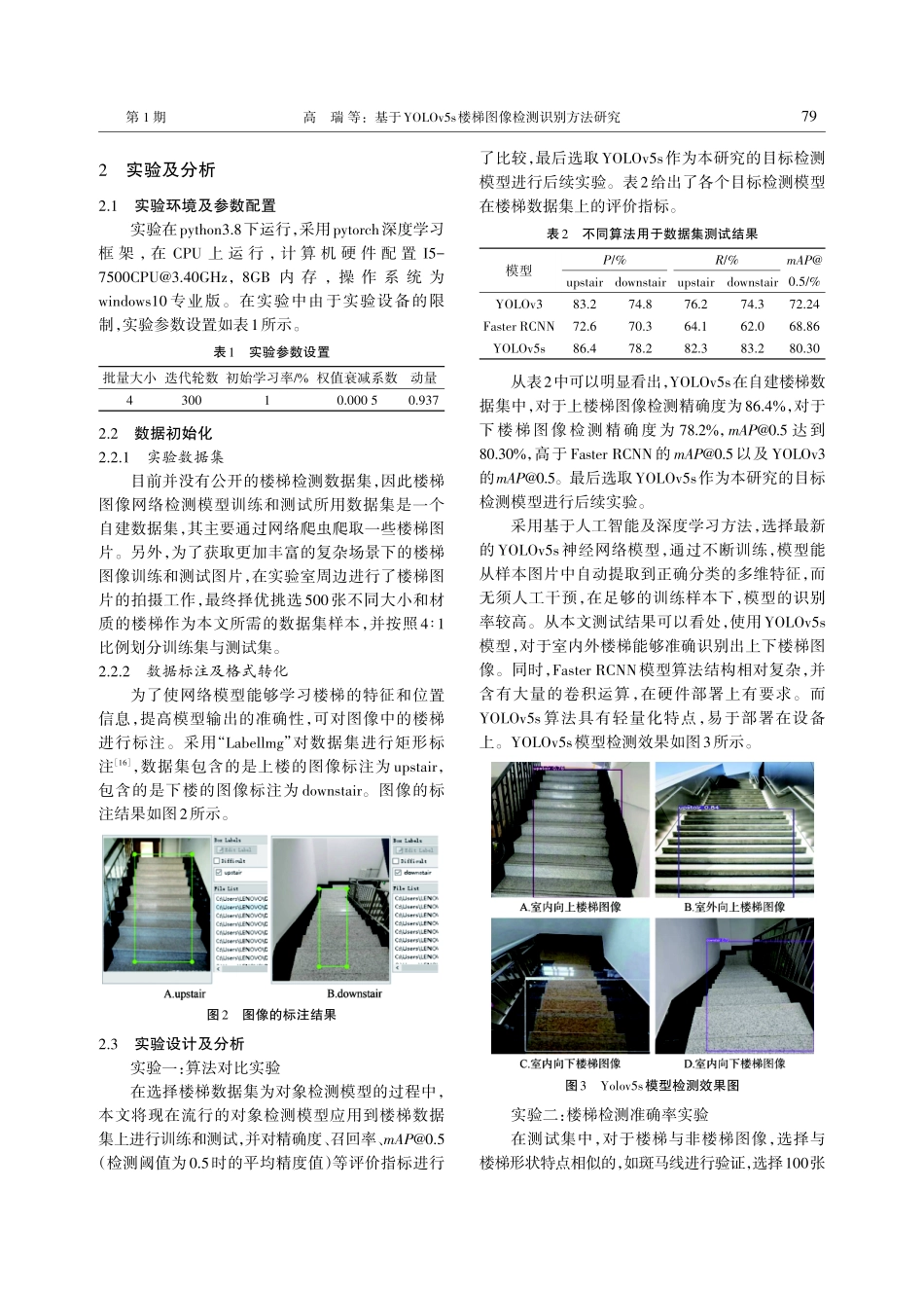
DOI:10.13876/J.cnki.ydnse.230310第43卷第1期2024年3月延安大学学报(自然科学版)JournalofYan’anUniversity(NaturalScienceEdition)Vol.43No.1Mar.2024基于YOLOv5s楼梯图像检测识别方法研究高瑞,雷文礼(延安大学物理与电子信息学院,陕西延安716000)摘要:楼梯区域作为一种典型的环境目标,无论是可以自主爬楼梯的机器人系统,还是可以提醒视力障碍者注意障碍物的软件系统,都需要有检测识别楼梯的功能。为了帮助他们在周围环境中导航,设计了一种基于YOLOv5s的楼梯图像检测算法。首先采用Labelme对楼梯数据集进行图片标注,对标注文件进行格式转化;其次搭建YOLOv5s网络模型训练环境,修改预训练模型配置文件,然后启动模型权重数据迁移训练,并输出最优模型参数;最后加载测试数据集对训练最优模型算法进行效果测试,算法均能识别出上下楼梯图像,并通过与其他目标检测算法对比测试,其具有更高的识别准确率。结果表明,该算法检测平均精度达到80.3%,泛化能力强,将该算法用于上下楼梯区域检测方法是可行的,可以为机器人对楼梯的自动检测识别提供一些参考,也可以为视障者提供有效帮助,市场应用前景良好。关键词:楼梯;YOLOv5s;图片标注;模型训练;识别中图分类号:TP391.4文献标识码:A文章编号:1004-602X(2024)01-0077-05随着科技对生活的影响,视力障碍者出行的安全性受到越来越多的关注,相关技术的发展提供了解决方案,使他们可以像正常人一样生活在社会中[1]。如今,视障辅助器具的发展已成为一个突出的研究领域。在过去的十年里,许多工作在这一领域已经完成,极大提升了视障者出行的积极性和便利性。楼梯在日常生活中既可以作为备选通路,也可以是障碍区域,视力障碍者在行走过程中无法避免,又因为这种构件结构的特点,容易使视力障碍者绊倒或者摔下楼梯[2]。所以研究楼梯检测识别方法有重要的意义。当前移动机器人对楼梯目标的识别主要依靠相机或者激光雷达,通过获取楼梯的连续边线特征和连续平面特征来识别楼梯。CARBONARA等[3]通过对图像进行边缘检测并提取平行边缘特征的方法识别楼梯,辅助视障者了解周围环境。针对边缘检测算法容易受到具有相同平行边缘线特征的环境目标(如斑马线及瓷砖墙面)干扰的特点,WANG等[4]在图像处理算法的基础上,结合RGBD相机得到深度信息,进一步对楼梯、斑马线等相似目标进行区分;叶一飞等[5]提出基于点云处理的复杂环境下楼梯区域识别算法。现有的检测楼梯方法有基...