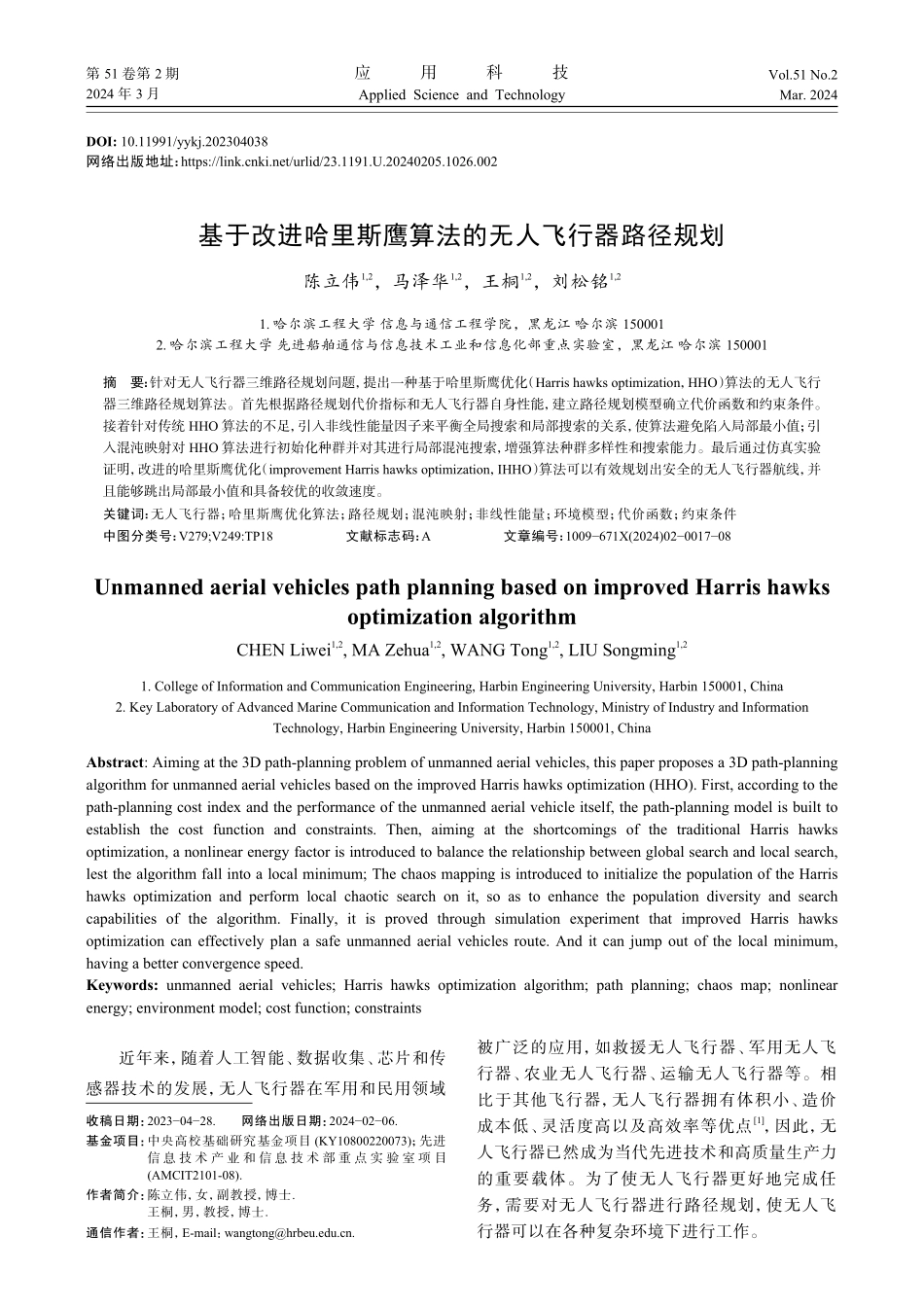
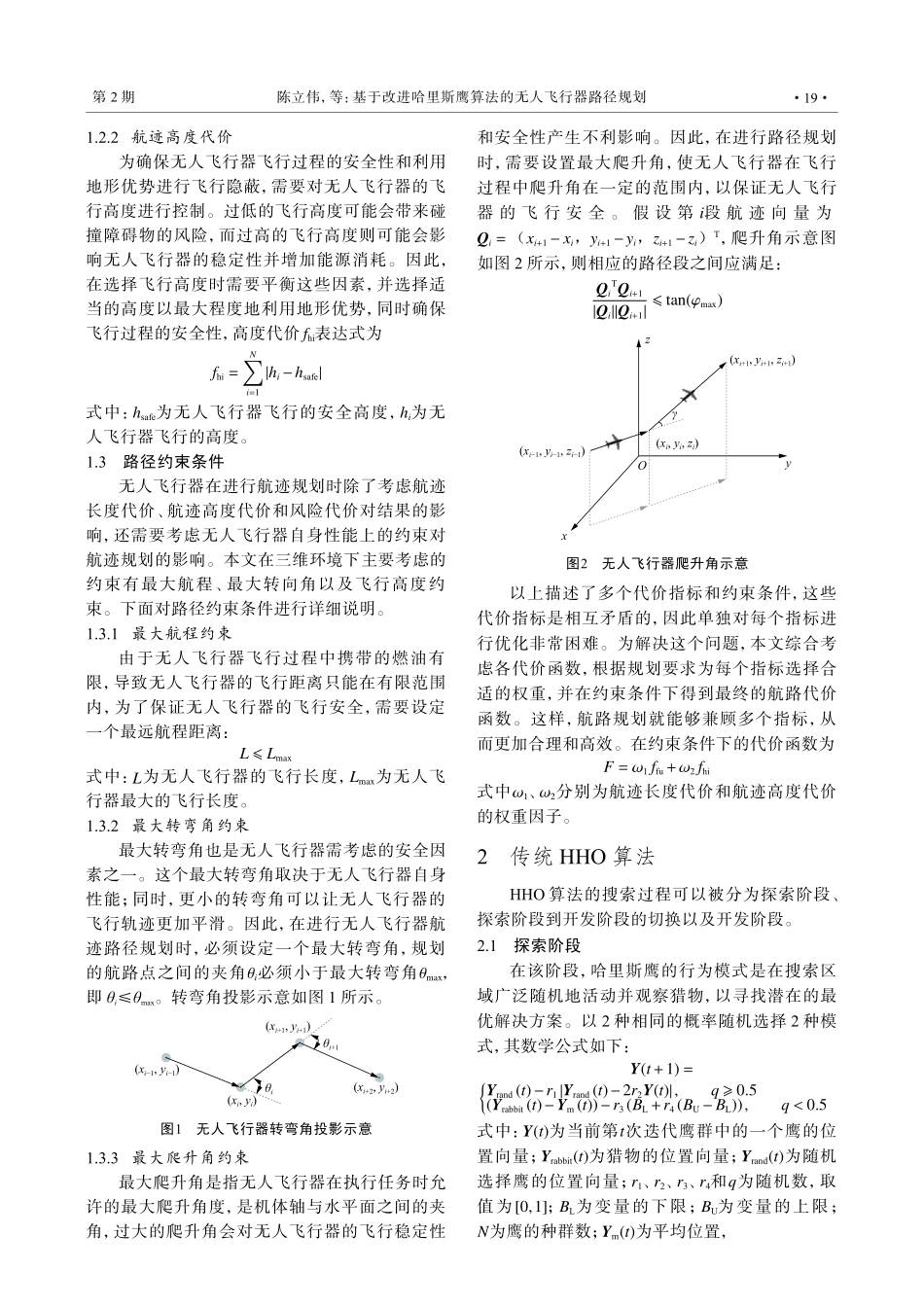
DOI:10.11991/yykj.202304038网络出版地址:https://link.cnki.net/urlid/23.1191.U.20240205.1026.002基于改进哈里斯鹰算法的无人飞行器路径规划陈立伟1,2,马泽华1,2,王桐1,2,刘松铭1,21.哈尔滨工程大学信息与通信工程学院,黑龙江哈尔滨1500012.哈尔滨工程大学先进船舶通信与信息技术工业和信息化部重点实验室,黑龙江哈尔滨150001摘要:针对无人飞行器三维路径规划问题,提出一种基于哈里斯鹰优化(Harrishawksoptimization,HHO)算法的无人飞行器三维路径规划算法。首先根据路径规划代价指标和无人飞行器自身性能,建立路径规划模型确立代价函数和约束条件。接着针对传统HHO算法的不足,引入非线性能量因子来平衡全局搜索和局部搜索的关系,使算法避免陷入局部最小值;引入混沌映射对HHO算法进行初始化种群并对其进行局部混沌搜索,增强算法种群多样性和搜索能力。最后通过仿真实验证明,改进的哈里斯鹰优化(improvementHarrishawksoptimization,IHHO)算法可以有效规划出安全的无人飞行器航线,并且能够跳出局部最小值和具备较优的收敛速度。关键词:无人飞行器;哈里斯鹰优化算法;路径规划;混沌映射;非线性能量;环境模型;代价函数;约束条件中图分类号:V279;V249:TP18文献标志码:A文章编号:1009−671X(2024)02−0017−08UnmannedaerialvehiclespathplanningbasedonimprovedHarrishawksoptimizationalgorithmCHENLiwei1,2,MAZehua1,2,WANGTong1,2,LIUSongming1,21.CollegeofInformationandCommunicationEngineering,HarbinEngineeringUniversity,Harbin150001,China2.KeyLaboratoryofAdvancedMarineCommunicationandInformationTechnology,MinistryofIndustryandInformationTechnology,HarbinEngineeringUniversity,Harbin150001,ChinaAbstract:Aimingatthe3Dpath-planningproblemofunmannedaerialvehicles,thispaperproposesa3Dpath-planningalgorithmforunmannedaerialvehiclesbasedontheimprovedHarrishawksoptimization(HHO).First,accordingtothepath-planningcostindexandtheperformanceoftheunmannedaerialvehicleitself,thepath-planningmodelisbuilttoestablishthecostfunctionandconstraints.Then,aimingattheshortcomingsofthetraditionalHarrishawksoptimization,anonlinearenergyfactorisintroducedtobalancetherelationshipbetweenglobalsearchandlocalsearch,lestthealgorithmfallintoalocalminimum;Thechaosmap...