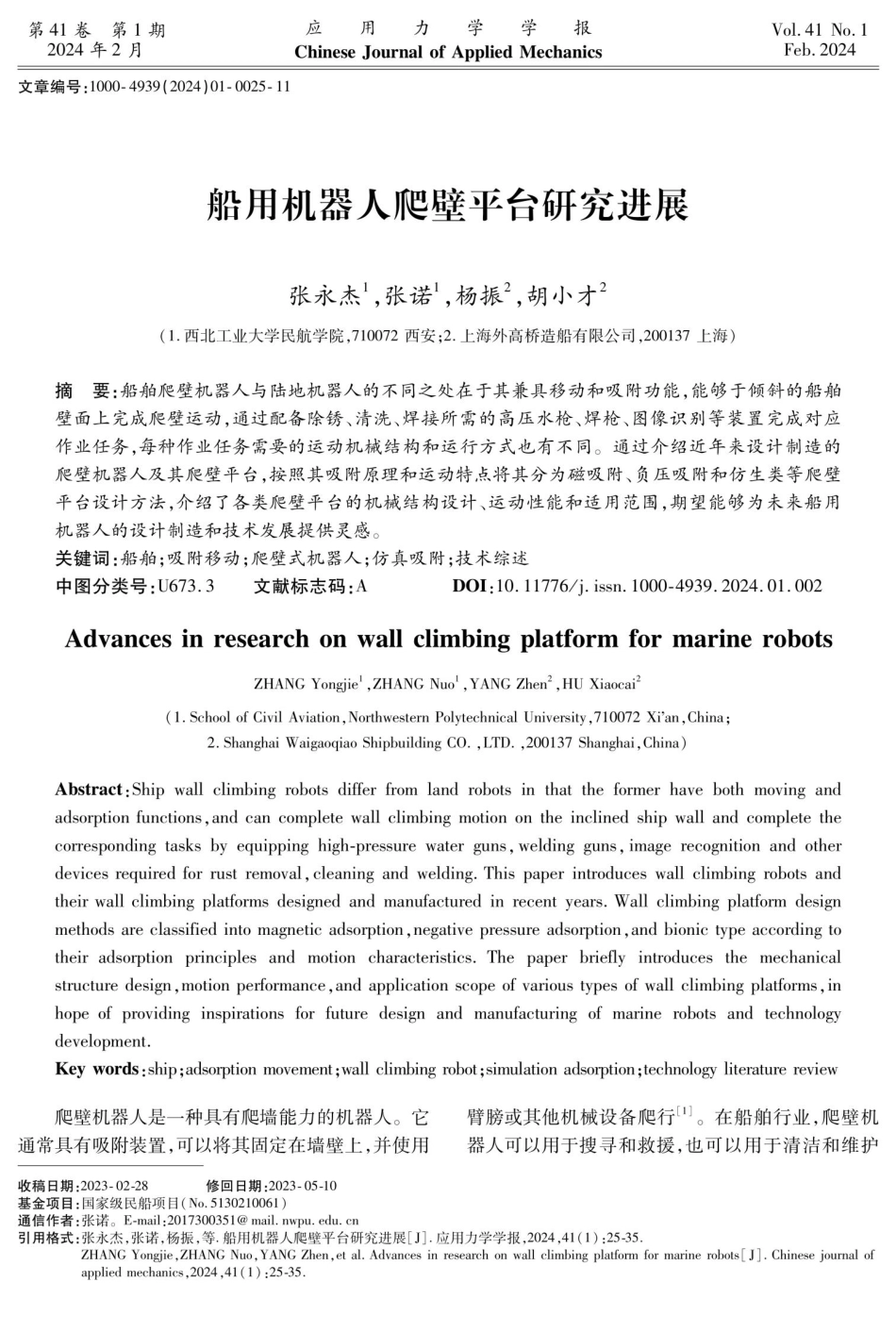
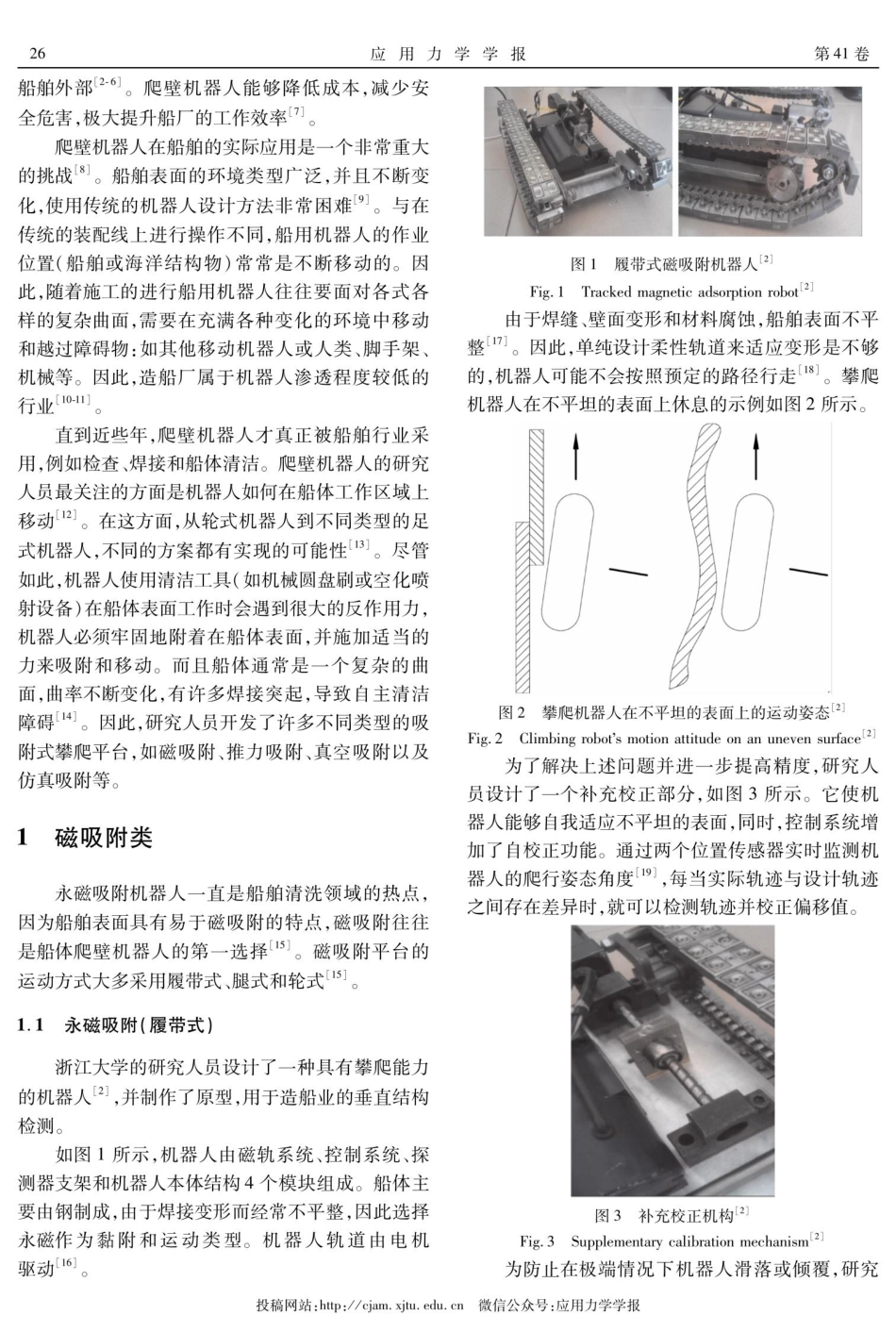
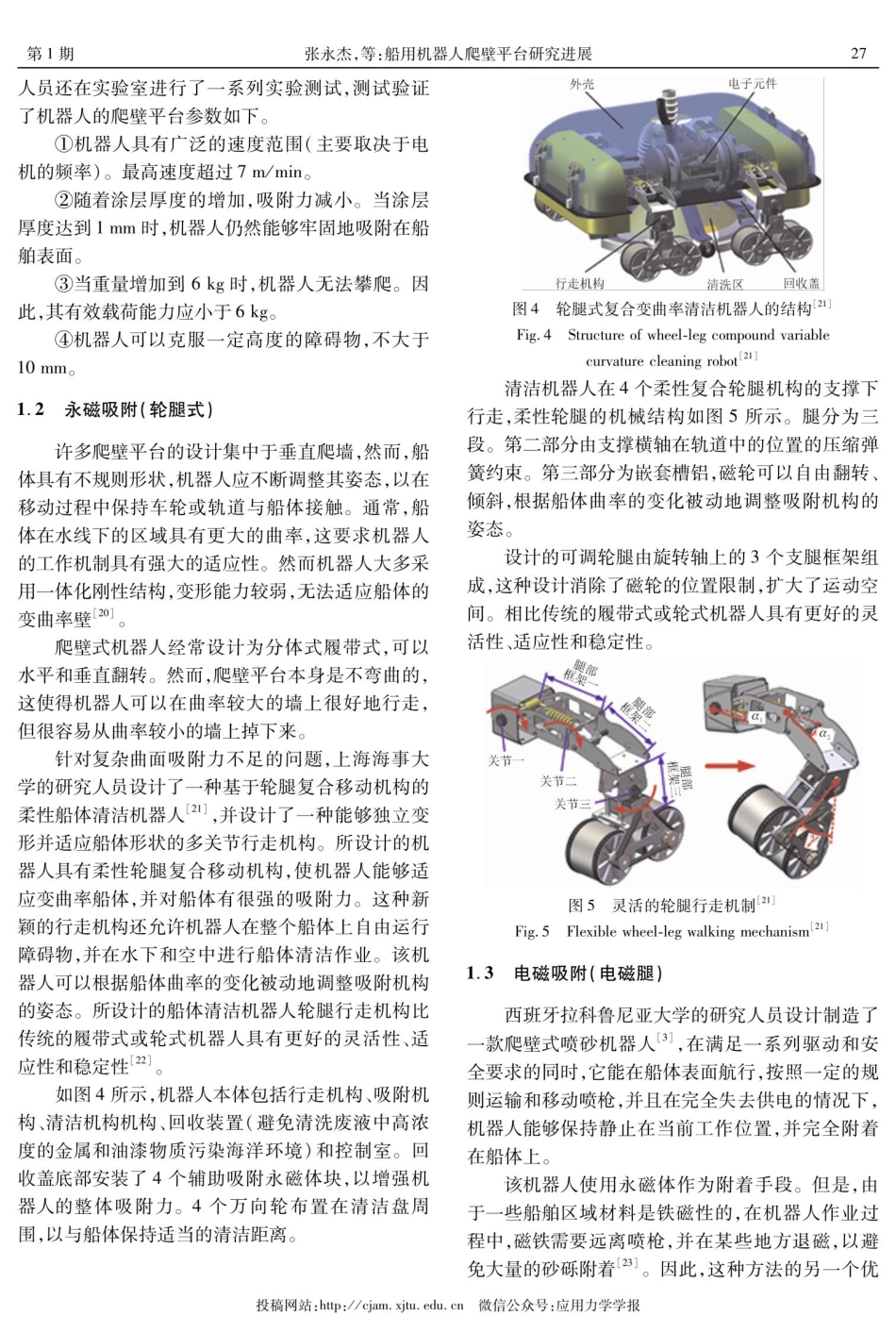
第41卷第1期2024年2月文章编号:1000-4939(2024)01-0025-11应用力学学报ChineseJournalofAppliedMechanicsVol.41No.1Feb.2024船用机器人爬壁平台研究进展张永杰',张诺",杨振²,胡小才(1.西北工业大学民航学院,710072西安;2.上海外高桥造船有限公司,200137上海)摘要:船舶爬壁机器人与陆地机器人的不同之处在于其兼具移动和吸附功能,能够于倾斜的船舶壁面上完成爬壁运动,通过配备除锈、清洗、焊接所需的高压水枪、焊枪、图像识别等装置完成对应作业任务,每种作业任务需要的运动机械结构和运行方式也有不同。通过介绍近年来设计制造的爬壁机器人及其爬壁平台,按照其吸附原理和运动特点将其分为磁吸附、负压吸附和仿生类等爬壁平台设计方法,介绍了各类爬壁平台的机械结构设计、运动性能和适用范围,期望能够为未来船用机器人的设计制造和技术发展提供灵感。关键词:船舶;吸附移动;爬壁式机器人;仿真吸附;技术综述中图分类号:U673.3Advancesinresearchonwallclimbingplatformformarinerobots(1.SchoolofCivilAviation,NorthwesternPolytechnicalUniversity,710072Xi'an,China;2.ShanghaiWaigaoqiaoShipbuildingCO.,LTD.,200137Shanghai,China)Abstract:Shipwallclimbingrobotsdifferfromlandrobotsinthattheformerhavebothmovingandadsorptionfunctions,andcancompletewallclimbingmotionontheinclinedshipwallandcompletethecorrespondingtasksbyequippinghigh-pressurewaterguns,weldingguns,imagerecognitionandotherdevicesrequiredforrustremoval,cleaningandwelding.Thispaperintroduceswallclimbingrobotsandtheirwallclimbingplatformsdesignedandmanufacturedinrecentyears.Wallclimbingplatformdesignmethodsareclassifiedintomagneticadsorption,negativepressureadsorption,andbionictypeaccordingtotheiradsorptionprinciplesandmotioncharacteristics.Thepaperbrieflyintroducesthemechanicalstructuredesign,motionperformance,andapplicationscopeofvarioustypesofwallclimbingplatforms,inhopeofprovidinginspirationsforfuturedesignandmanufacturingofmarinerobotsandtechnologydevelopment.Keywords:ship;adsorptionmovement;wallclimbingrobot;simulationadsorption;technologyliteraturereview爬壁机器人是一种具有爬墙能力的机器人。它通常具有吸附装置,可以将其固定在墙壁上,并使用收稿日期:2023-02-28基金项...