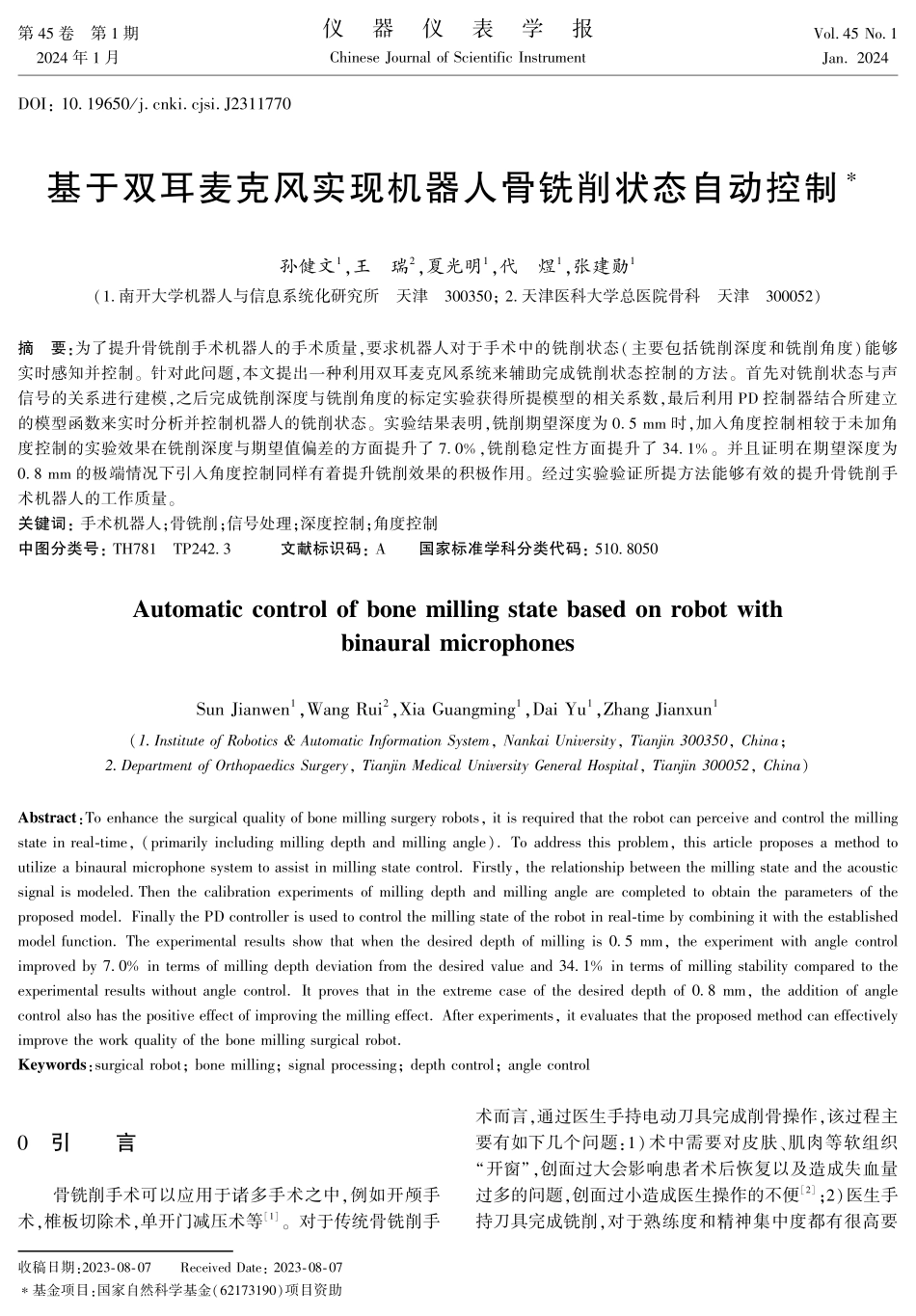
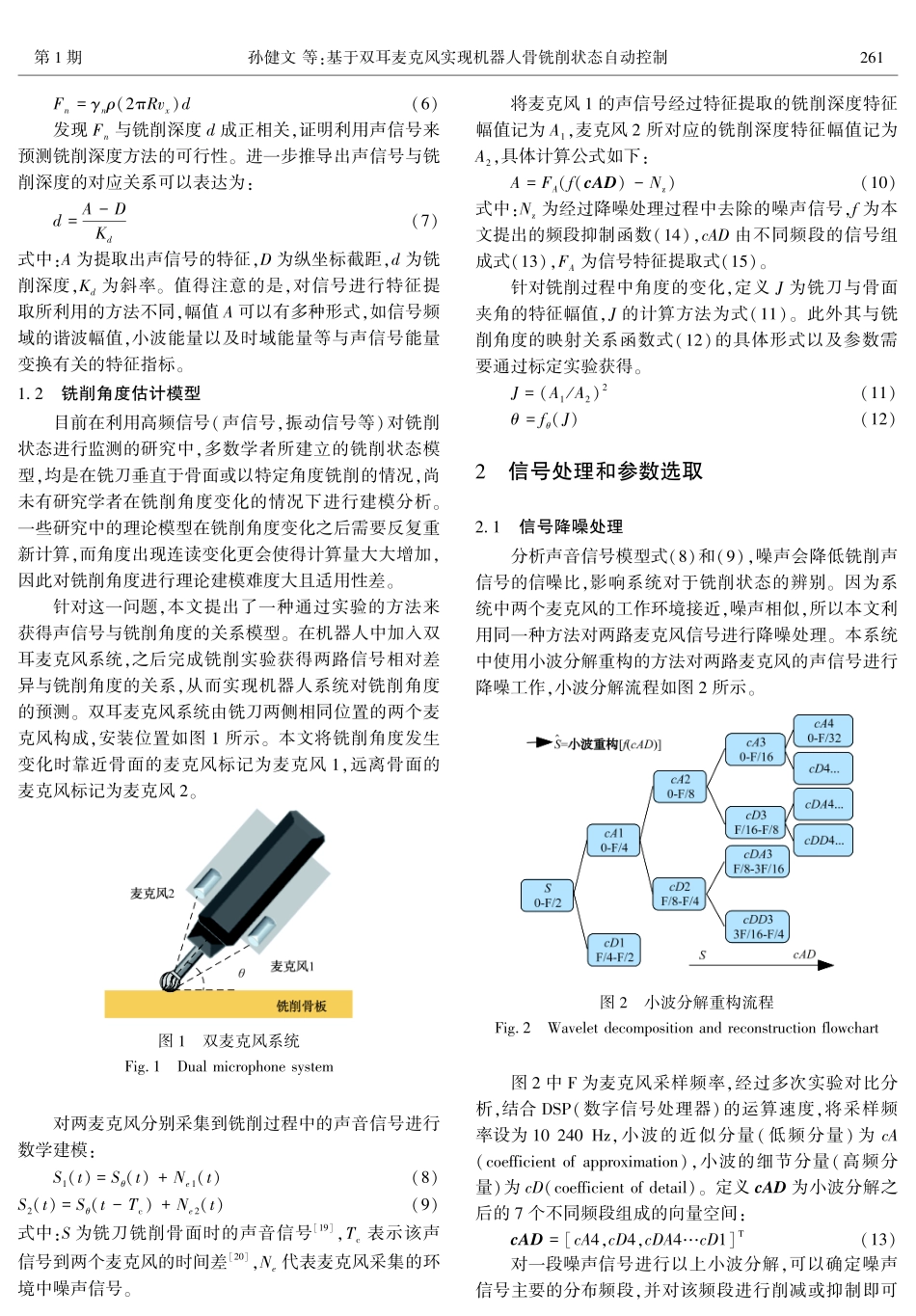
第45卷第1期2024年1月仪器仪表学报ChineseJournalofScientificInstrumentVol.45No.1Jan.2024DOI:10.19650/j.cnki.cjsi.J2311770收稿日期:2023-08-07ReceivedDate:2023-08-07∗基金项目:国家自然科学基金(62173190)项目资助基于双耳麦克风实现机器人骨铣削状态自动控制∗孙健文1,王瑞2,夏光明1,代煜1,张建勋1(1.南开大学机器人与信息系统化研究所天津300350;2.天津医科大学总医院骨科天津300052)摘要:为了提升骨铣削手术机器人的手术质量,要求机器人对于手术中的铣削状态(主要包括铣削深度和铣削角度)能够实时感知并控制。针对此问题,本文提出一种利用双耳麦克风系统来辅助完成铣削状态控制的方法。首先对铣削状态与声信号的关系进行建模,之后完成铣削深度与铣削角度的标定实验获得所提模型的相关系数,最后利用PD控制器结合所建立的模型函数来实时分析并控制机器人的铣削状态。实验结果表明,铣削期望深度为0.5mm时,加入角度控制相较于未加角度控制的实验效果在铣削深度与期望值偏差的方面提升了7.0%,铣削稳定性方面提升了34.1%。并且证明在期望深度为0.8mm的极端情况下引入角度控制同样有着提升铣削效果的积极作用。经过实验验证所提方法能够有效的提升骨铣削手术机器人的工作质量。关键词:手术机器人;骨铣削;信号处理;深度控制;角度控制中图分类号:TH781TP242.3文献标识码:A国家标准学科分类代码:510.8050AutomaticcontrolofbonemillingstatebasedonrobotwithbinauralmicrophonesSunJianwen1,WangRui2,XiaGuangming1,DaiYu1,ZhangJianxun1(1.InstituteofRobotics&AutomaticInformationSystem,NankaiUniversity,Tianjin300350,China;2.DepartmentofOrthopaedicsSurgery,TianjinMedicalUniversityGeneralHospital,Tianjin300052,China)Abstract:Toenhancethesurgicalqualityofbonemillingsurgeryrobots,itisrequiredthattherobotcanperceiveandcontrolthemillingstateinreal-time,(primarilyincludingmillingdepthandmillingangle).Toaddressthisproblem,thisarticleproposesamethodtoutilizeabinauralmicrophonesystemtoassistinmillingstatecontrol.Firstly,therelationshipbetweenthemillingstateandtheacousticsignalismodeled.Thenthecalibrationexperimentsofmillingdepthandmillinganglearecompletedtoobtaintheparametersoftheproposedmodel.FinallythePDcontrollerisusedtocontrolthemillingstateoftherobotinreal-timebycombiningitwiththe...