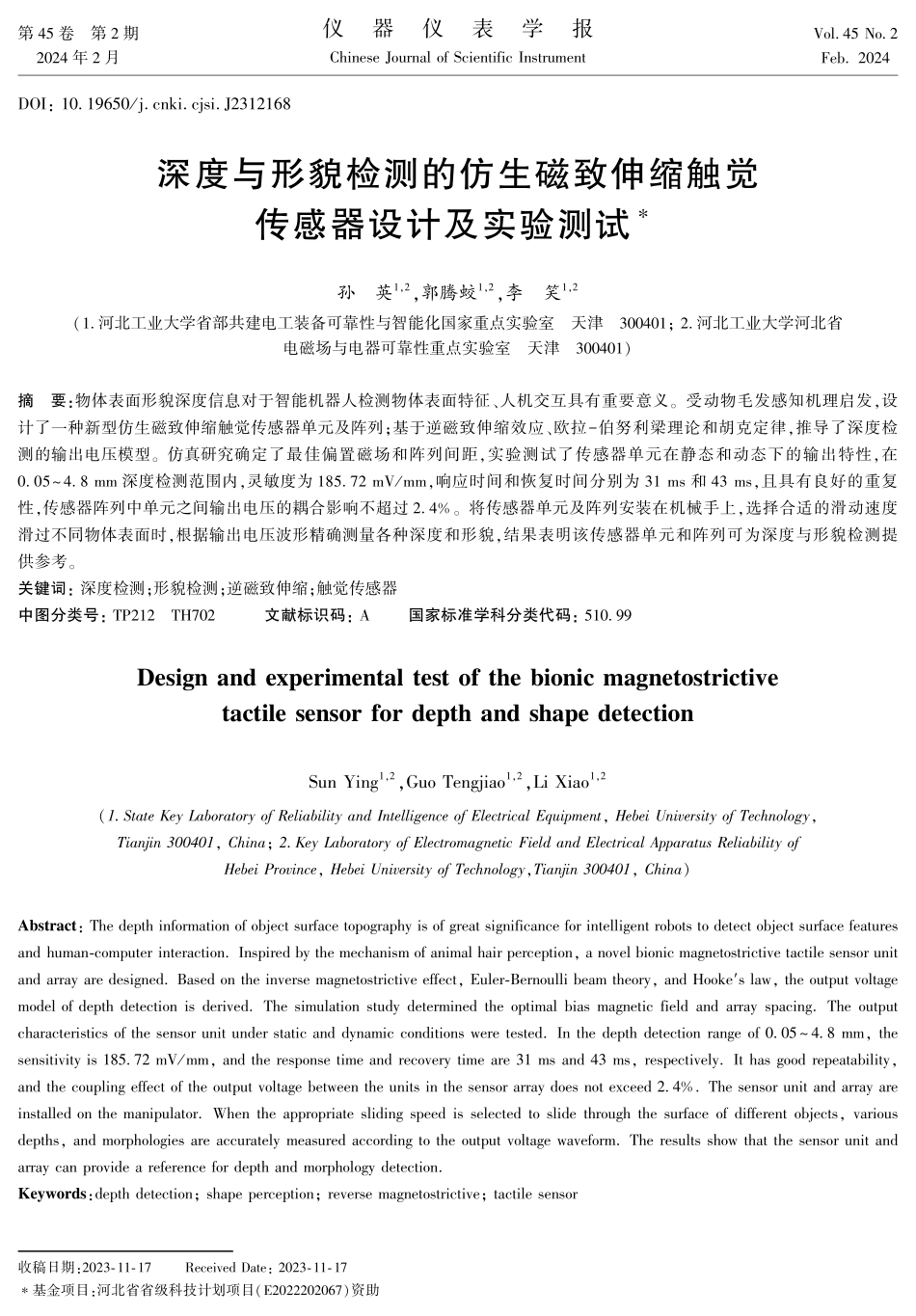
第45卷第2期2024年2月仪器仪表学报ChineseJournalofScientificInstrumentVol.45No.2Feb.2024DOI:10.19650/j.cnki.cjsi.J2312168收稿日期:2023-11-17ReceivedDate:2023-11-17∗基金项目:河北省省级科技计划项目(E2022202067)资助深度与形貌检测的仿生磁致伸缩触觉传感器设计及实验测试∗孙英1,2,郭腾蛟1,2,李笑1,2(1.河北工业大学省部共建电工装备可靠性与智能化国家重点实验室天津300401;2.河北工业大学河北省电磁场与电器可靠性重点实验室天津300401)摘要:物体表面形貌深度信息对于智能机器人检测物体表面特征、人机交互具有重要意义。受动物毛发感知机理启发,设计了一种新型仿生磁致伸缩触觉传感器单元及阵列;基于逆磁致伸缩效应、欧拉-伯努利梁理论和胡克定律,推导了深度检测的输出电压模型。仿真研究确定了最佳偏置磁场和阵列间距,实验测试了传感器单元在静态和动态下的输出特性,在0.05~4.8mm深度检测范围内,灵敏度为185.72mV/mm,响应时间和恢复时间分别为31ms和43ms,且具有良好的重复性,传感器阵列中单元之间输出电压的耦合影响不超过2.4%。将传感器单元及阵列安装在机械手上,选择合适的滑动速度滑过不同物体表面时,根据输出电压波形精确测量各种深度和形貌,结果表明该传感器单元和阵列可为深度与形貌检测提供参考。关键词:深度检测;形貌检测;逆磁致伸缩;触觉传感器中图分类号:TP212TH702文献标识码:A国家标准学科分类代码:510.99DesignandexperimentaltestofthebionicmagnetostrictivetactilesensorfordepthandshapedetectionSunYing1,2,GuoTengjiao1,2,LiXiao1,2(1.StateKeyLaboratoryofReliabilityandIntelligenceofElectricalEquipment,HebeiUniversityofTechnology,Tianjin300401,China;2.KeyLaboratoryofElectromagneticFieldandElectricalApparatusReliabilityofHebeiProvince,HebeiUniversityofTechnology,Tianjin300401,China)Abstract:Thedepthinformationofobjectsurfacetopographyisofgreatsignificanceforintelligentrobotstodetectobjectsurfacefeaturesandhuman-computerinteraction.Inspiredbythemechanismofanimalhairperception,anovelbionicmagnetostrictivetactilesensorunitandarrayaredesigned.Basedontheinversemagnetostrictiveeffect,Euler-Bernoullibeamtheory,andHooke′slaw,theoutputvoltagemodelofdepthdetectionisderived.Thesimulationstudydeterminedtheoptimalbiasmagneticfieldandarrayspacing.Theoutputc...