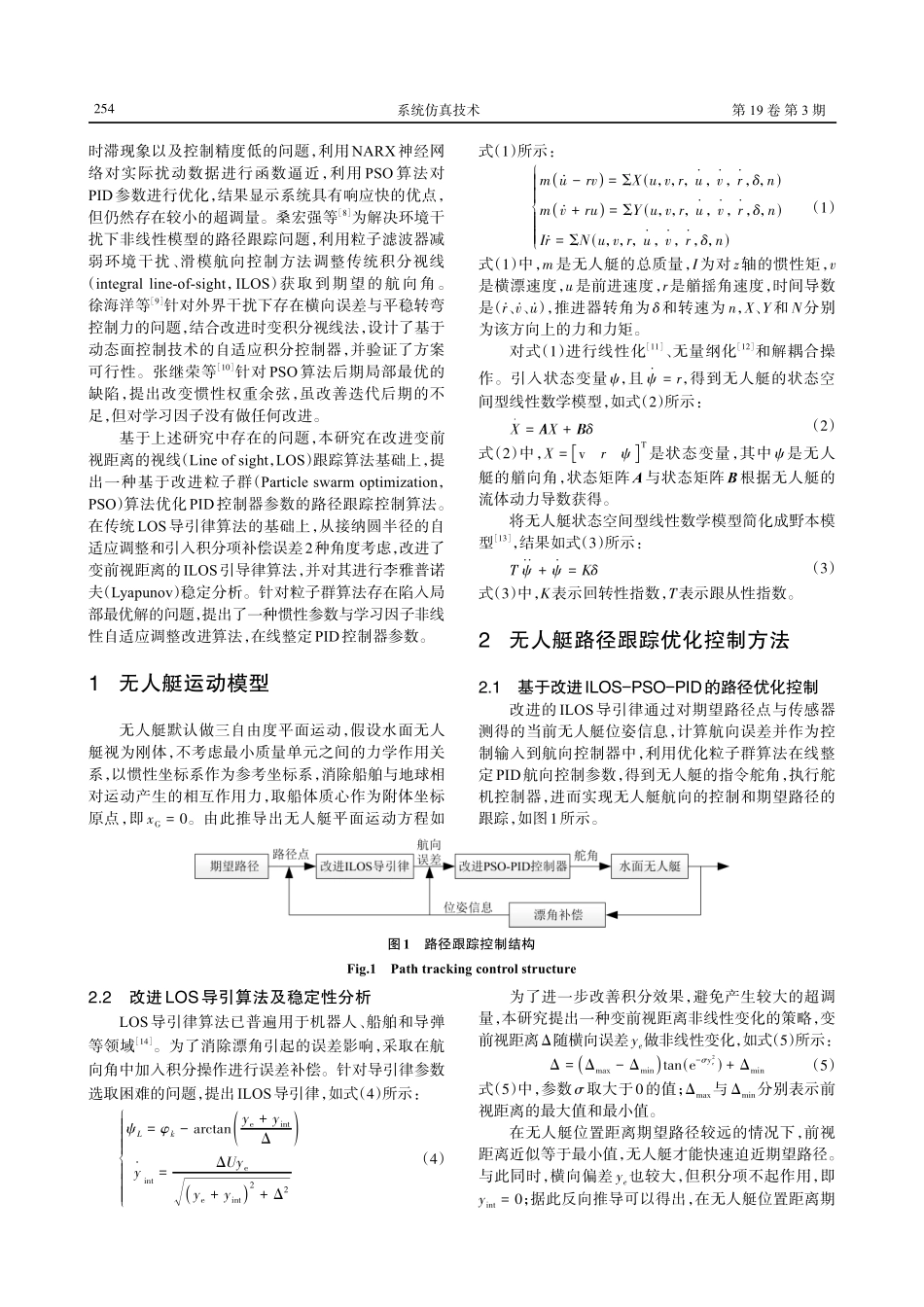
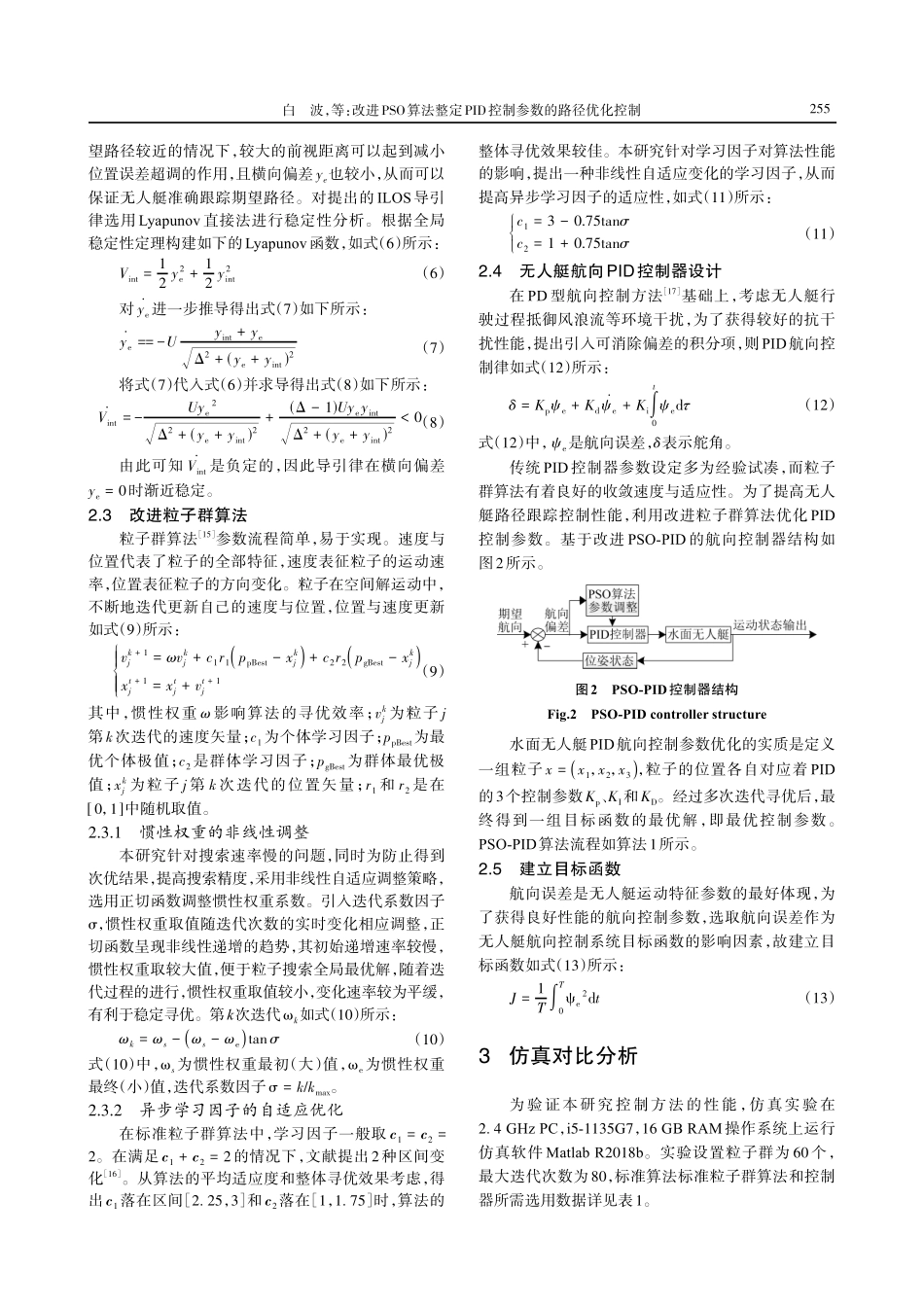
2023年8月第19卷第3期系统仿真技术SystemSimulationTechnologyAug.,2023Vol.19,No.3改进PSO算法整定PID控制参数的路径优化控制白波1*,陈继洋2,周宁2(1.上海申电云数字科技有限公司,上海200063;2.上海海洋大学工程学院,上海201306)摘要:为解决无人艇航行过程中存在控制精度低、偏离期望航迹的问题,改进变前视距离的视线(Lineofsight,LOS)跟踪算法,提出一种基于改进粒子群(Particleswarmoptimization,PSO)优化航向PID控制器参数的算法。首先,基于无人艇数学模型对航行漂角的影响,提出改进变前视距离视线导引跟踪算法,通过引入积分项减小横向误差,并对算法进行Lyapunov稳定分析。接着,为了提高算法的性能,对粒子群算法的惯性权重和学习因子进行非线性动态自适应调整,优化航向PID控制参数。最后,通过Matlab进行控制算法仿真。仿真结果表明,提出的路径优化算法具有航向误差小、系统稳定性优和响应速度快的优点。关键词:无人艇;改进视线法;改进粒子群算法;自适应;优化控制PathOptimizationControlwithPIDControlParametersTunedbyImprovedPSOAlgorithmBAIBo1*,CHENJiyang2,ZHOUNing2(1.ShanghaiShendianCloudDigitalTechnologyCo.,Ltd.,Shanghai200063,China;2.SchoolofEngineering,ShanghaiOceanUniversity,Shanghai201306,China)Abstract:Inordertosolvetheproblemoflowcontrolaccuracyanddeviationfromtheexpectedtrackduringthenavigationofunmannedcraft,thelineofsighttrackingalgorithmwithchangeableforward-sightdistanceisoptimizedandamethodforoptimizingtheheadingPIDcontrolparametersaccordingtoanimprovedparticleswarmoptimizationalgorithmispresented.Firstly,Aimingattheinfluenceofnavigationdriftangle,animprovedlineofsightguidanceandtrackingalgorithmwithvariableforward-lookingdistanceisproposed,thetransverseerrorisreducedbyintroducingtheintegralterm,andtheLyapunovstabilityofthealgorithmisanalyzed;Inordertoimprovetheperformanceandefficiencyofthealgorithm,theinertiaweightandlearningfactorofparticleswarmoptimizationalgorithmareadjustednonlinearlyanddynamically,andtheheadingPIDcontrolparametersareoptimized;Finally,thecontrolalgorithmissimulatedbyMATLAB.Thesimulationresultsshowthattheschemehastheadvantagesofsmallheadingerror,e...