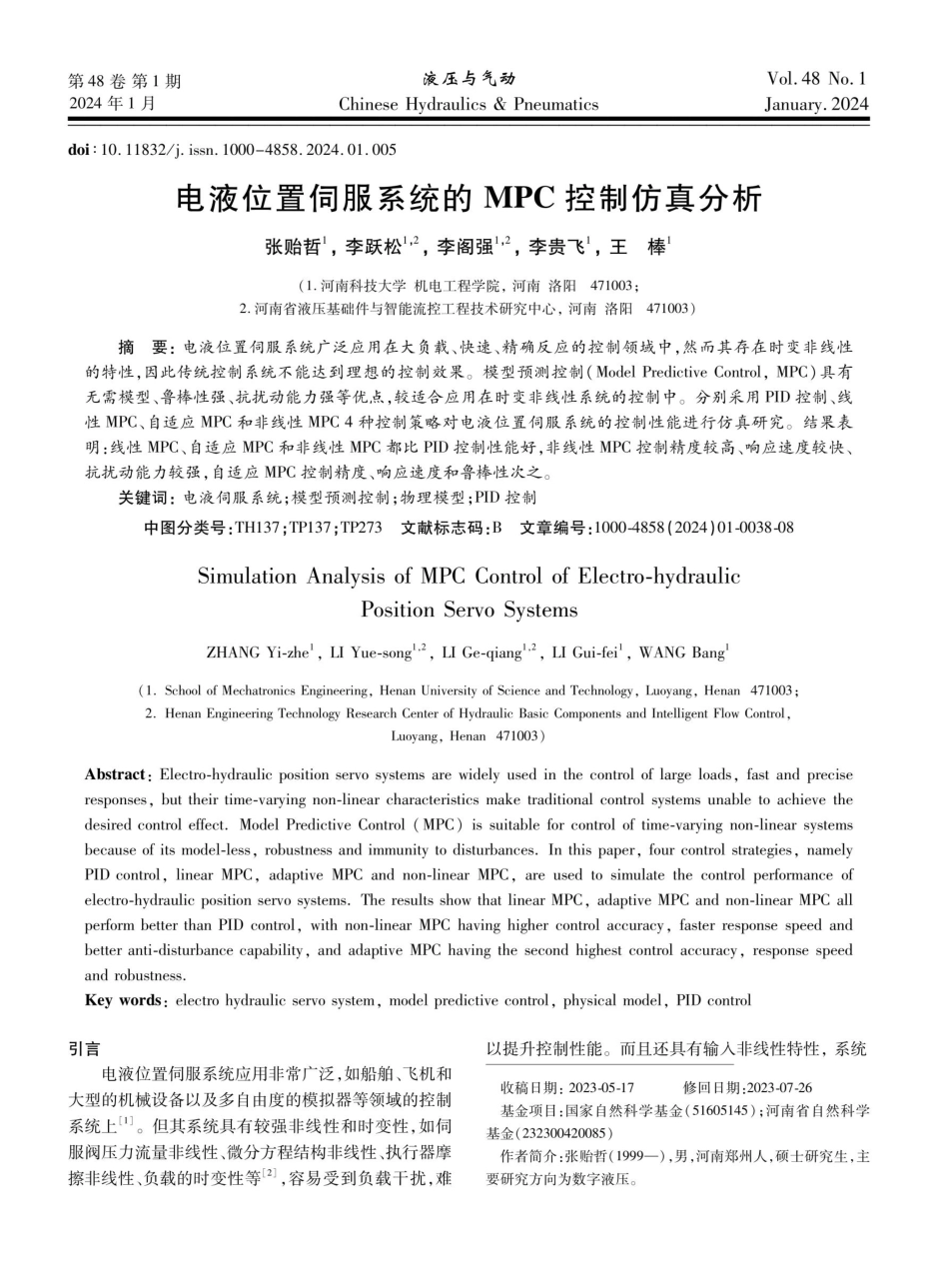
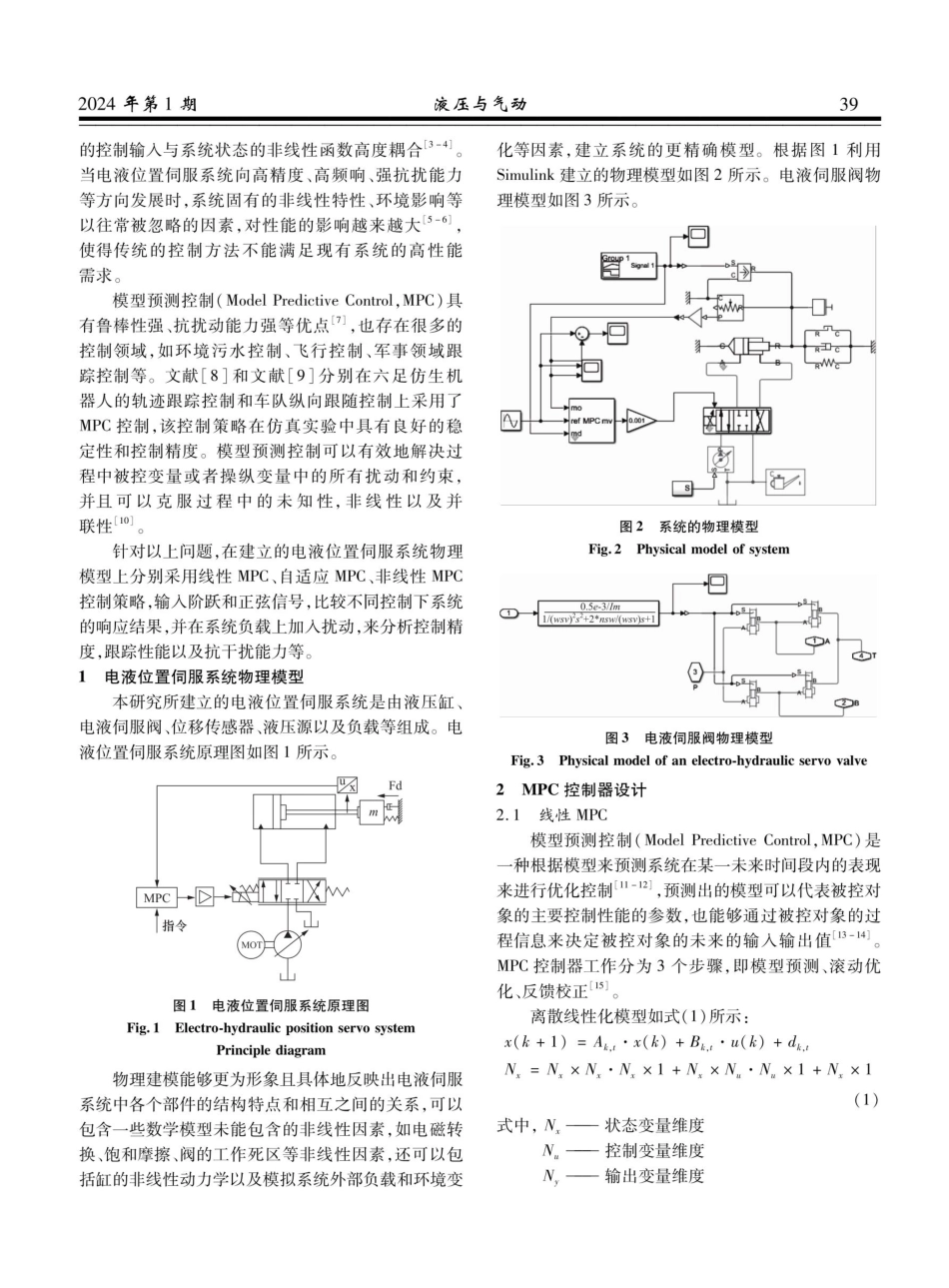
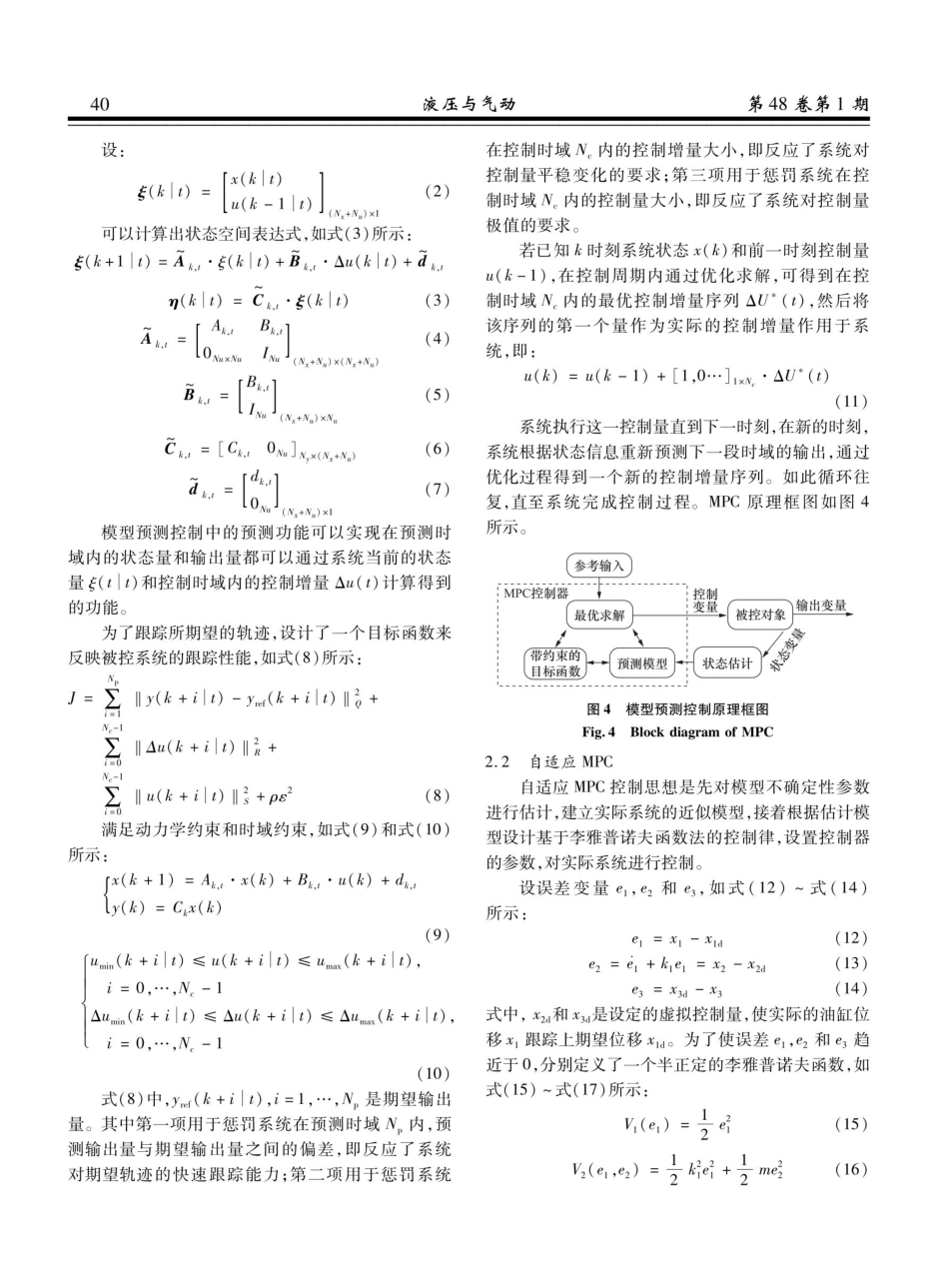
第48卷第1期2024年1月doi:10.11832/j.issn.1000-4858.2024.01.005电液位置伺服系统的MPC控制仿真分析张贻哲",李跃松"²,李阁强"²,李贵飞',王棒(1.河南科技大学机电工程学院,河南洛阳471003;2.河南省液压基础件与智能流控工程技术研究中心,河南洛阳471003)摘要:电液位置伺服系统广泛应用在大负载、快速、精确反应的控制领域中,然而其存在时变非线性的特性,因此传统控制系统不能达到理想的控制效果。模型预测控制(ModelPredictiveControl,MPC)具有无需模型、鲁棒性强、抗扰动能力强等优点,较适合应用在时变非线性系统的控制中。分别采用PID控制、线性MPC、自适应MPC和非线性MPC4种控制策略对电液位置伺服系统的控制性能进行仿真研究。结果表明:线性MPC、自适应MPC和非线性MPC都比PID控制性能好,非线性MPC控制精度较高、响应速度较快、抗扰动能力较强,自适应MPC控制精度、响应速度和鲁棒性次之。关键词:电液伺服系统;模型预测控制;物理模型;PID控制中图分类号:TH137;TP137;TP273SimulationAnalysisofMPCControlofElectro-hydraulicZHANGYi-zhe',LIYue-song'2,LIGe-qiang'-2,LIGui-feil,WANGBang'(1.SchoolofMechatronicsEngineering,HenanUniversityofScienceandTechnology,Luoyang,Henan471003;2.HenanEngineeringTechnologyResearchCenterofHydraulicBasicComponentsandIntelligentFlowControl,Abstract:Electro-hydraulicpositionservosystemsarewidelyusedinthecontroloflargeloads,fastandpreciseresponses,buttheirtime-varyingnon-linearcharacteristicsmaketraditionalcontrolsystemsunabletoachievethedesiredcontroleffect.ModelPredictiveControl(MPC)issuitableforcontroloftime-varyingnon-linearsystemsbecauseofitsmodel-less,robustnessandimmunitytodisturbances.Inthispaper,fourcontrolstrategies,namelyPIDcontrol,linearMPC,adaptiveMPCandnon-linearMPC,areusedtosimulatethecontrolperformanceofelectro-hydraulicpositionservosystems.TheresultsshowthatlinearMPC,adaptiveMPCandnon-linearMPCallperformbetterthanPIDcontrol,withnon-linearMPChavinghighercontrolaccuracy,fasterresponsespeedandbetteranti-disturbancecapability,andadaptiveMPChavingthesecondhighestcontrolaccuracy,responsespeedandrobustness.Keywords:electrohydraulicservosystem,modelpredictivecontrol,physicalmodel,P...