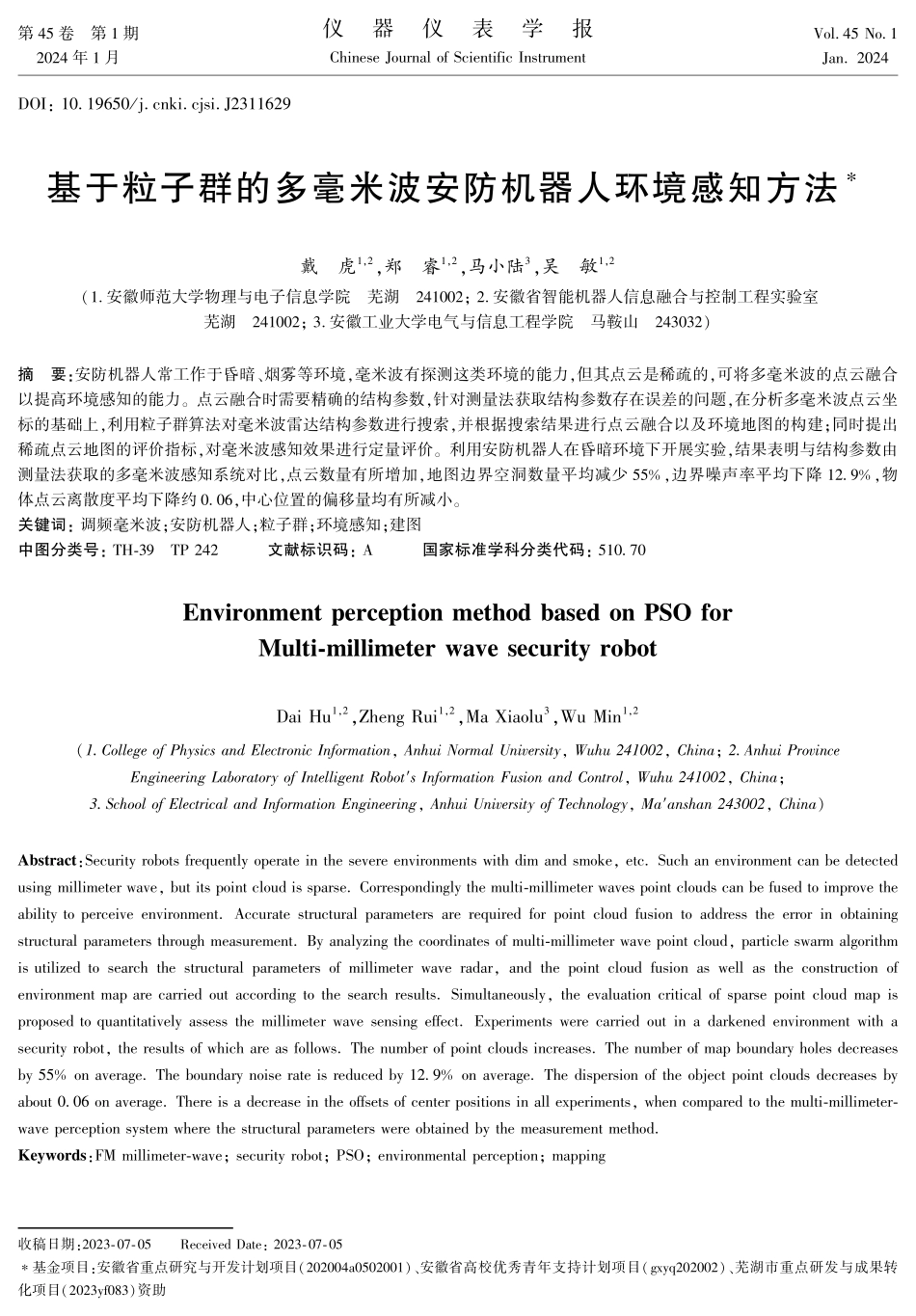
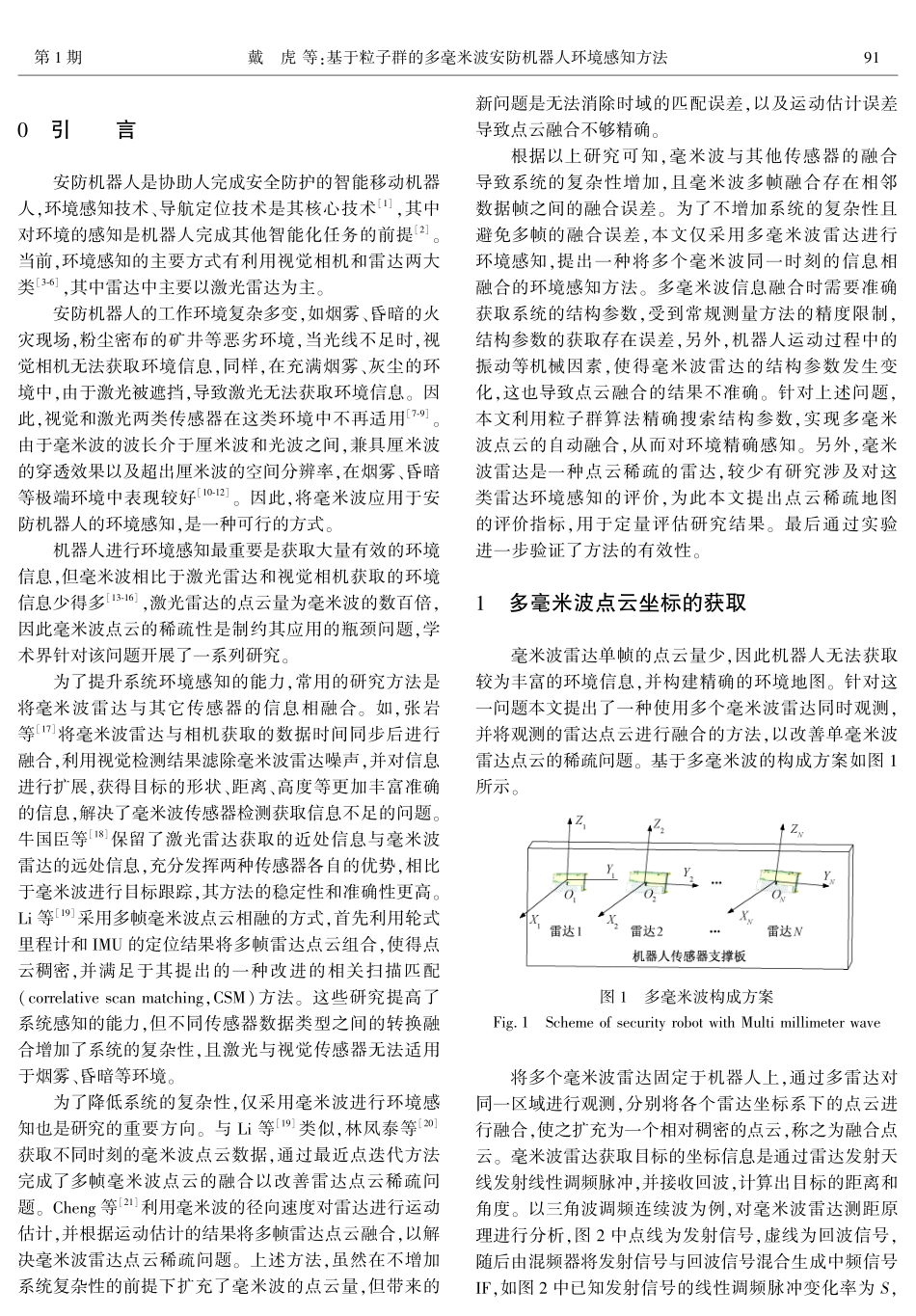
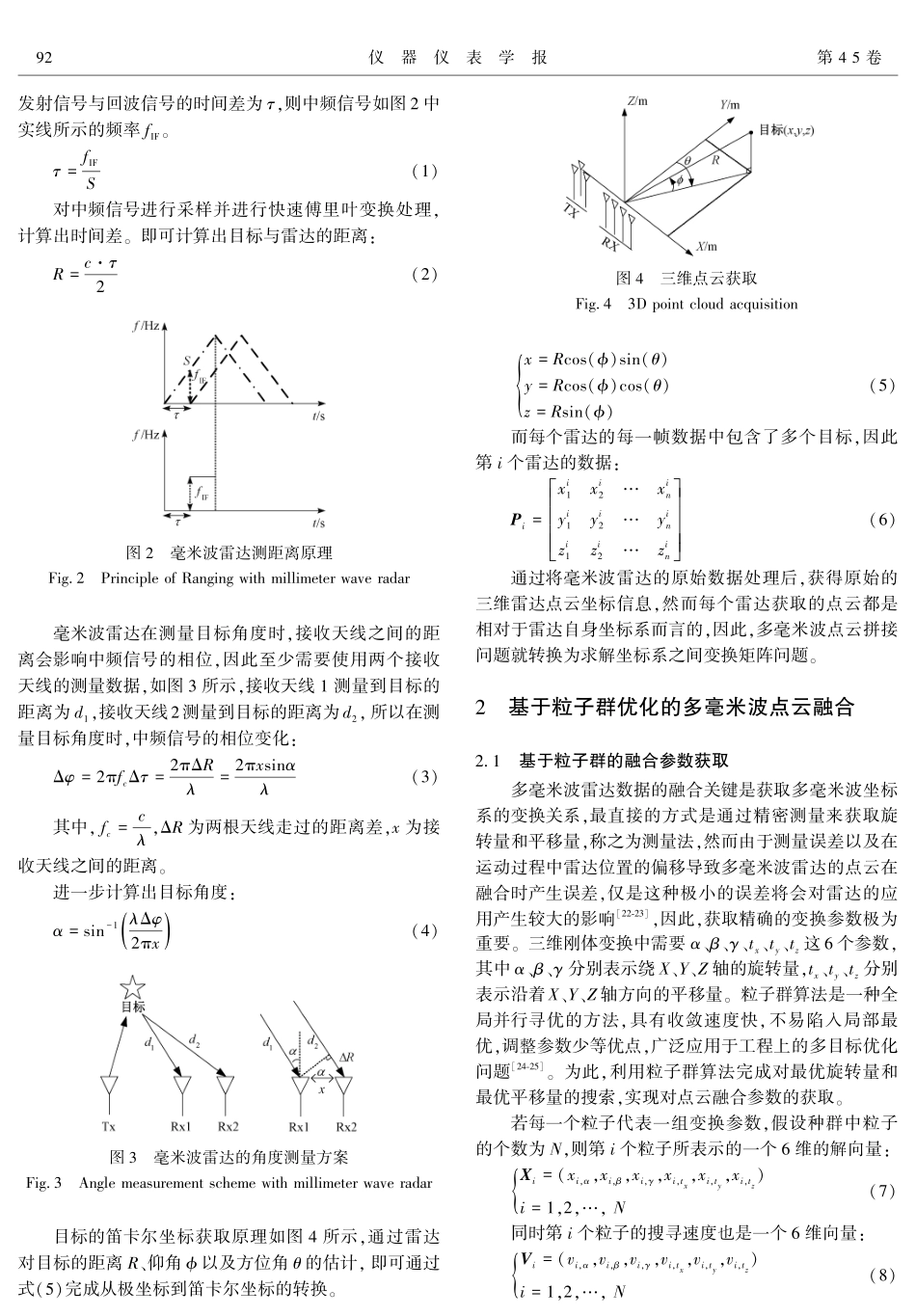
第45卷第1期2024年1月仪器仪表学报ChineseJournalofScientificInstrumentVol.45No.1Jan.2024DOI:10.19650/j.cnki.cjsi.J2311629收稿日期:2023-07-05ReceivedDate:2023-07-05∗基金项目:安徽省重点研究与开发计划项目(202004a0502001)、安徽省高校优秀青年支持计划项目(gxyq202002)、芜湖市重点研发与成果转化项目(2023yf083)资助基于粒子群的多毫米波安防机器人环境感知方法∗戴虎1,2,郑睿1,2,马小陆3,吴敏1,2(1.安徽师范大学物理与电子信息学院芜湖241002;2.安徽省智能机器人信息融合与控制工程实验室芜湖241002;3.安徽工业大学电气与信息工程学院马鞍山243032)摘要:安防机器人常工作于昏暗、烟雾等环境,毫米波有探测这类环境的能力,但其点云是稀疏的,可将多毫米波的点云融合以提高环境感知的能力。点云融合时需要精确的结构参数,针对测量法获取结构参数存在误差的问题,在分析多毫米波点云坐标的基础上,利用粒子群算法对毫米波雷达结构参数进行搜索,并根据搜索结果进行点云融合以及环境地图的构建;同时提出稀疏点云地图的评价指标,对毫米波感知效果进行定量评价。利用安防机器人在昏暗环境下开展实验,结果表明与结构参数由测量法获取的多毫米波感知系统对比,点云数量有所增加,地图边界空洞数量平均减少55%,边界噪声率平均下降12.9%,物体点云离散度平均下降约0.06,中心位置的偏移量均有所减小。关键词:调频毫米波;安防机器人;粒子群;环境感知;建图中图分类号:TH-39TP242文献标识码:A国家标准学科分类代码:510.70EnvironmentperceptionmethodbasedonPSOforMulti-millimeterwavesecurityrobotDaiHu1,2,ZhengRui1,2,MaXiaolu3,WuMin1,2(1.CollegeofPhysicsandElectronicInformation,AnhuiNormalUniversity,Wuhu241002,China;2.AnhuiProvinceEngineeringLaboratoryofIntelligentRobot′sInformationFusionandControl,Wuhu241002,China;3.SchoolofElectricalandInformationEngineering,AnhuiUniversityofTechnology,Ma′anshan243002,China)Abstract:Securityrobotsfrequentlyoperateinthesevereenvironmentswithdimandsmoke,etc.Suchanenvironmentcanbedetectedusingmillimeterwave,butitspointcloudissparse.Correspondinglythemulti-millimeterwavespointcloudscanbefusedtoimprovetheabilitytoperceiveenvironment.Accuratestructuralparametersarerequiredforpointcloudfusiontoaddresstheerrorinobtainingstructuralparametersthroughmeasurement....