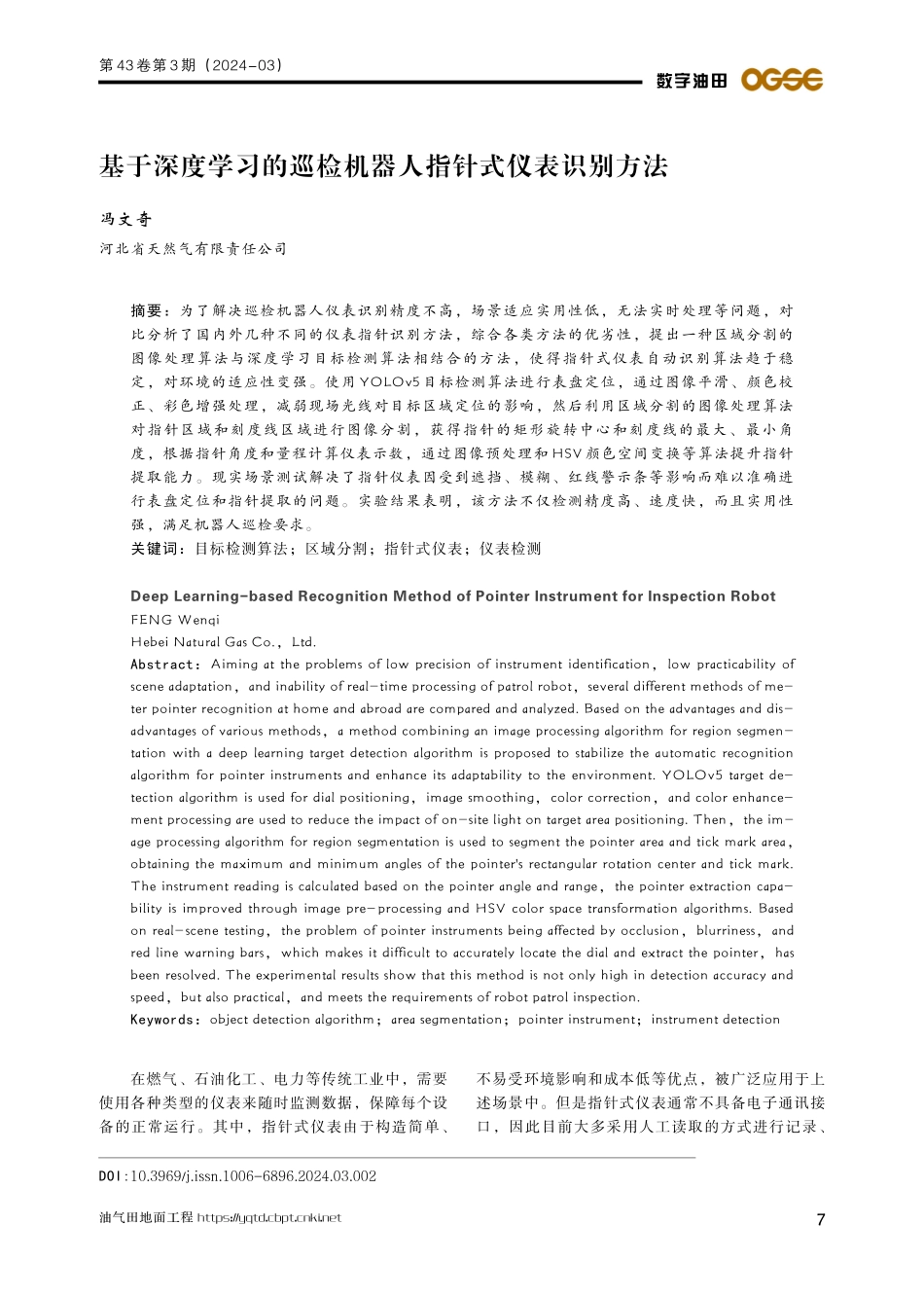
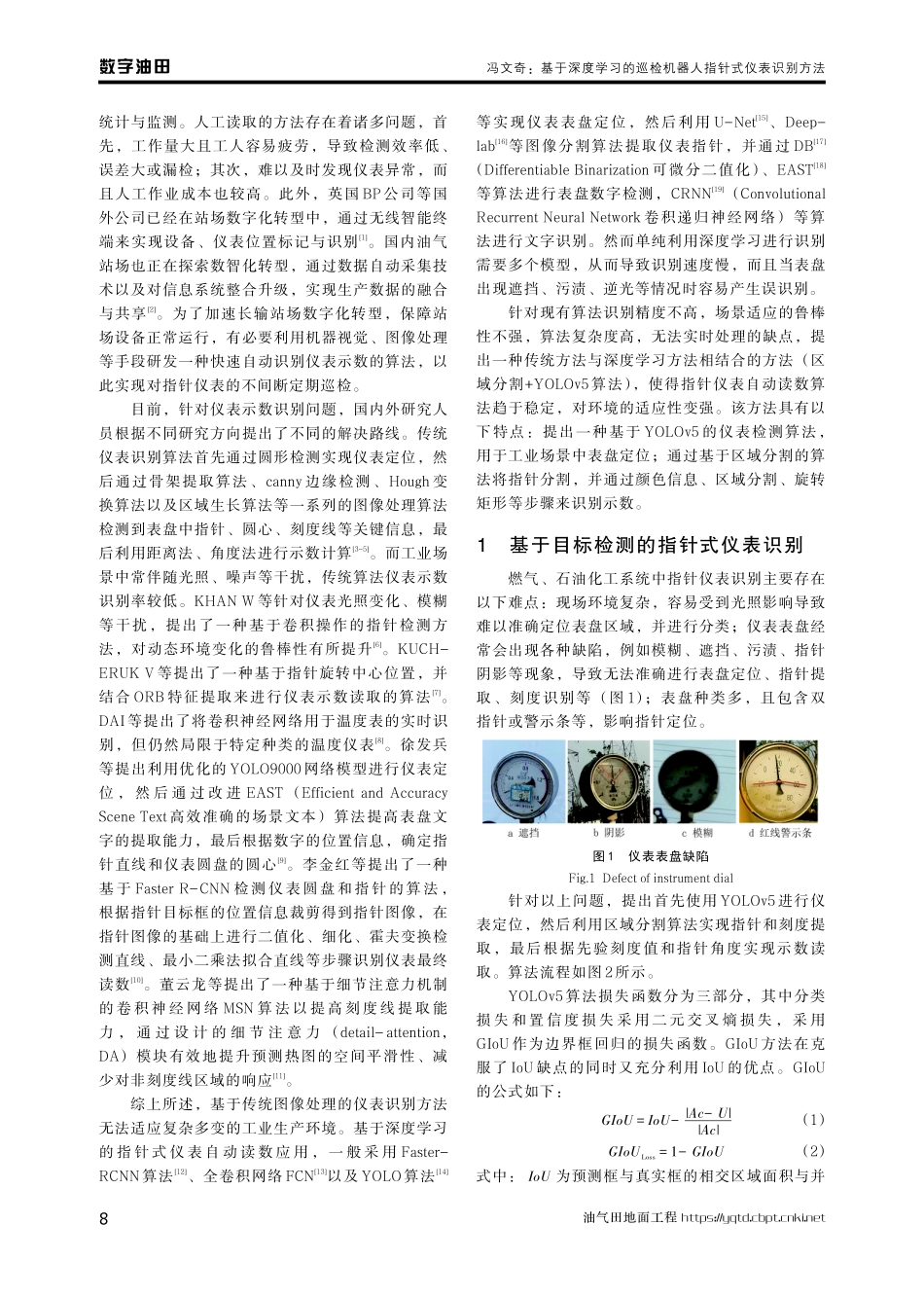
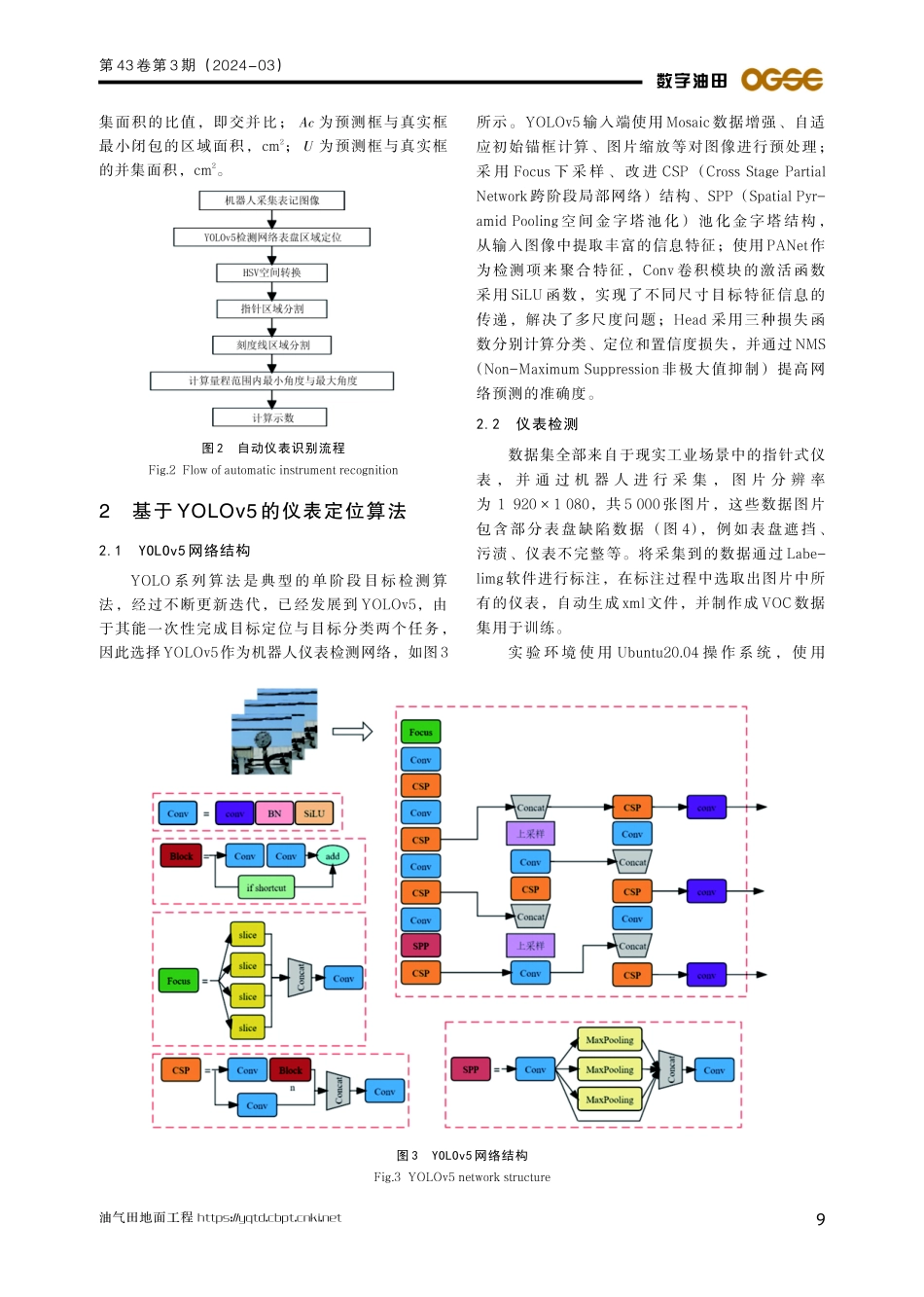
第43卷第3期(2024-03)油气田地面工程https://yqtd.cbpt.cnki.net数字油田基于深度学习的巡检机器人指针式仪表识别方法冯文奇河北省天然气有限责任公司摘要:为了解决巡检机器人仪表识别精度不高,场景适应实用性低,无法实时处理等问题,对比分析了国内外几种不同的仪表指针识别方法,综合各类方法的优劣性,提出一种区域分割的图像处理算法与深度学习目标检测算法相结合的方法,使得指针式仪表自动识别算法趋于稳定,对环境的适应性变强。使用YOLOv5目标检测算法进行表盘定位,通过图像平滑、颜色校正、彩色增强处理,减弱现场光线对目标区域定位的影响,然后利用区域分割的图像处理算法对指针区域和刻度线区域进行图像分割,获得指针的矩形旋转中心和刻度线的最大、最小角度,根据指针角度和量程计算仪表示数,通过图像预处理和HSV颜色空间变换等算法提升指针提取能力。现实场景测试解决了指针仪表因受到遮挡、模糊、红线警示条等影响而难以准确进行表盘定位和指针提取的问题。实验结果表明,该方法不仅检测精度高、速度快,而且实用性强,满足机器人巡检要求。关键词:目标检测算法;区域分割;指针式仪表;仪表检测DeepLearning-basedRecognitionMethodofPointerInstrumentforInspectionRobotFENGWenqiHebeiNaturalGasCo.,Ltd.Abstract:Aimingattheproblemsoflowprecisionofinstrumentidentification,lowpracticabilityofsceneadaptation,andinabilityofreal-timeprocessingofpatrolrobot,severaldifferentmethodsofme-terpointerrecognitionathomeandabroadarecomparedandanalyzed.Basedontheadvantagesanddis-advantagesofvariousmethods,amethodcombininganimageprocessingalgorithmforregionsegmen-tationwithadeeplearningtargetdetectionalgorithmisproposedtostabilizetheautomaticrecognitionalgorithmforpointerinstrumentsandenhanceitsadaptabilitytotheenvironment.YOLOv5targetde-tectionalgorithmisusedfordialpositioning,imagesmoothing,colorcorrection,andcolorenhance-mentprocessingareusedtoreducetheimpactofon-sitelightontargetareapositioning.Then,theim-ageprocessingalgorithmforregionsegmentationisusedtosegmentthepointerareaandtickmarkarea,obtainingthemaximumandminimumanglesofthepointer'srectangularrotationcenterandtickmark.Theinstrumentreadingiscalculatedbasedonthepointeranglean...