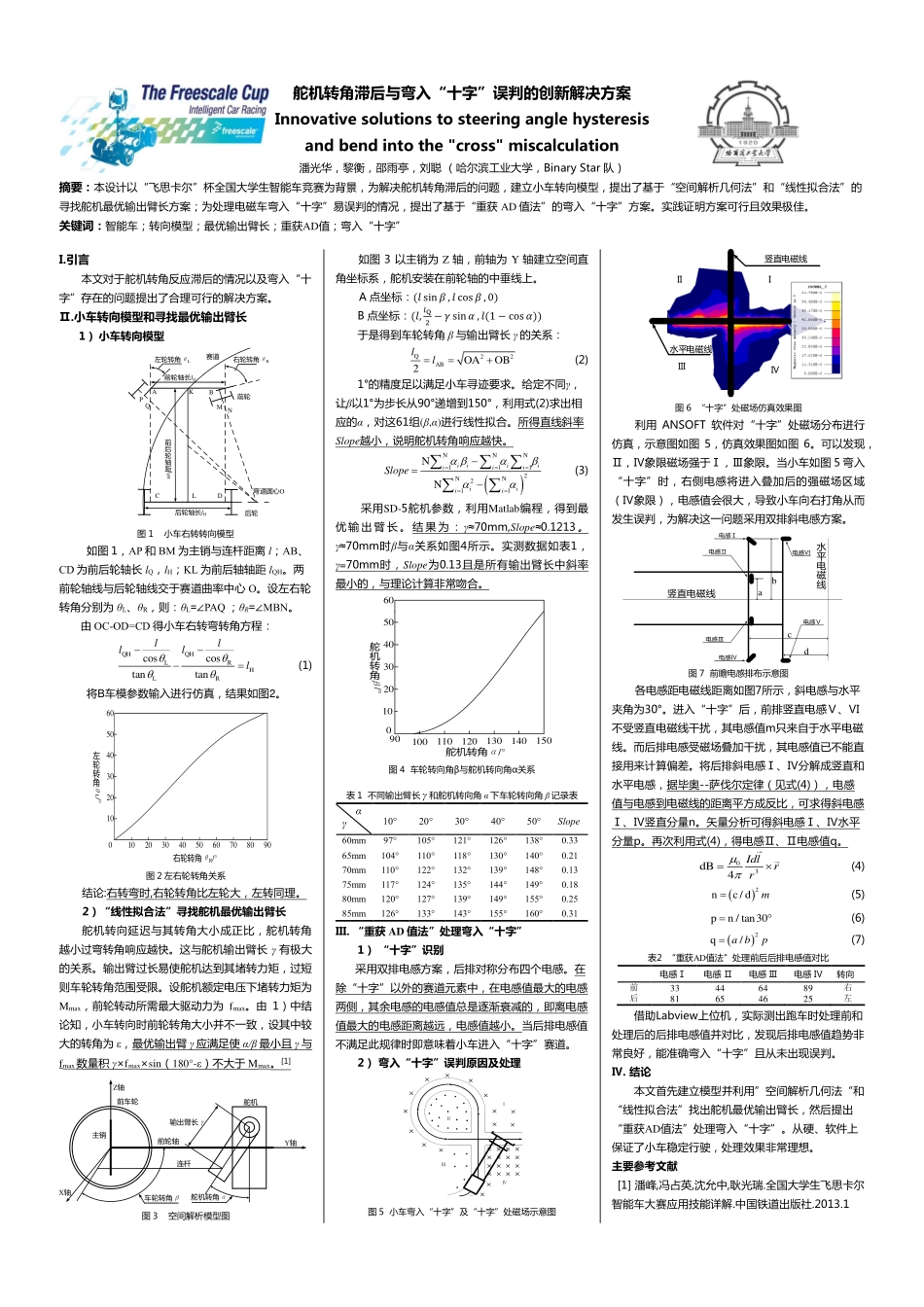
舵机转角滞后与弯入“十字”误判的创新解决方案Innovativesolutionstosteeringanglehysteresisandbendintothe"cross"miscalculation潘光华,黎衡,邵雨亭,刘聪(哈尔滨工业大学,BinaryStar队)摘要:本设计以“飞思卡尔”杯全国大学生智能车竞赛为背景,为解决舵机转角滞后的问题,建立小车转向模型,提出了基于“空间解析几何法”和“线性拟合法”的寻找舵机最优输出臂长方案;为处理电磁车弯入“十字”易误判的情况,提出了基于“重获AD值法”的弯入“十字”方案。实践证明方案可行且效果极佳。关键词:智能车;转向模型;最优输出臂长;重获AD值;弯入“十字”I.引言本文对于舵机转角反应滞后的情况以及弯入“十字”存在的问题提出了合理可行的解决方案。Ⅱ.小车转向模型和寻找最优输出臂长1)小车转向模型图1小车右转转向模型如图1,AP和BM为主销与连杆距离l;AB、CD为前后轮轴长lQ,lH;KL为前后轴轴距lQH。两前轮轴线与后轮轴线交于赛道曲率中心O。设左右轮转角分别为θL、θR,则:θL=∠PAQ;θR=∠MBN。由OC-OD=CD得小车右转弯转角方程:QHQHLRHLRcoscostantanlllll(1)将B车模参数输入进行仿真,结果如图2。图2左右轮转角关系结论:右转弯时,右轮转角比左轮大,左转同理。2)“线性拟合法”寻找舵机最优输出臂长舵机转向延迟与其转角大小成正比,舵机转角越小过弯转角响应越快。这与舵机输出臂长γ有极大的关系。输出臂过长易使舵机达到其堵转力矩,过短则车轮转角范围受限。设舵机额定电压下堵转力矩为Mmax,前轮转动所需最大驱动力为fmax。由1)中结论知,小车转向时前轮转角大小并不一致,设其中较大的转角为ε,最优输出臂γ应满足使α/β最小且γ与fmax数量积γ×fmax×sin(180°-ε)不大于Mmax。[1]图3空间解析模型图如图3以主销为Z轴,前轴为Y轴建立空间直角坐标系,舵机安装在前轮轴的中垂线上。A点坐标:(𝑙sin𝛽,𝑙cos𝛽,0)B点坐标:(𝑙,𝑙Q2−𝛾sin𝛼,𝑙(1−cos𝛼))于是得到车轮转角β与输出臂长γ的关系:Q22ABOAOB2ll(2)1°的精度足以满足小车寻迹要求。给定不同γ,让β以1°为步长从90°递增到150°,利用式(2)求出相应的α,对这61组(β,α)进行线性拟合。所得直线斜率Slope越小,说明舵机转角响应越快。NNN1112NN211NNiiiiiiiiiiiSlope(3)采用SD-5舵机参数,利用Matlab编程,得到最优输出臂长。结果为:γ≈70mm,Slope≈0.1213。γ≈70mm时β与α关...