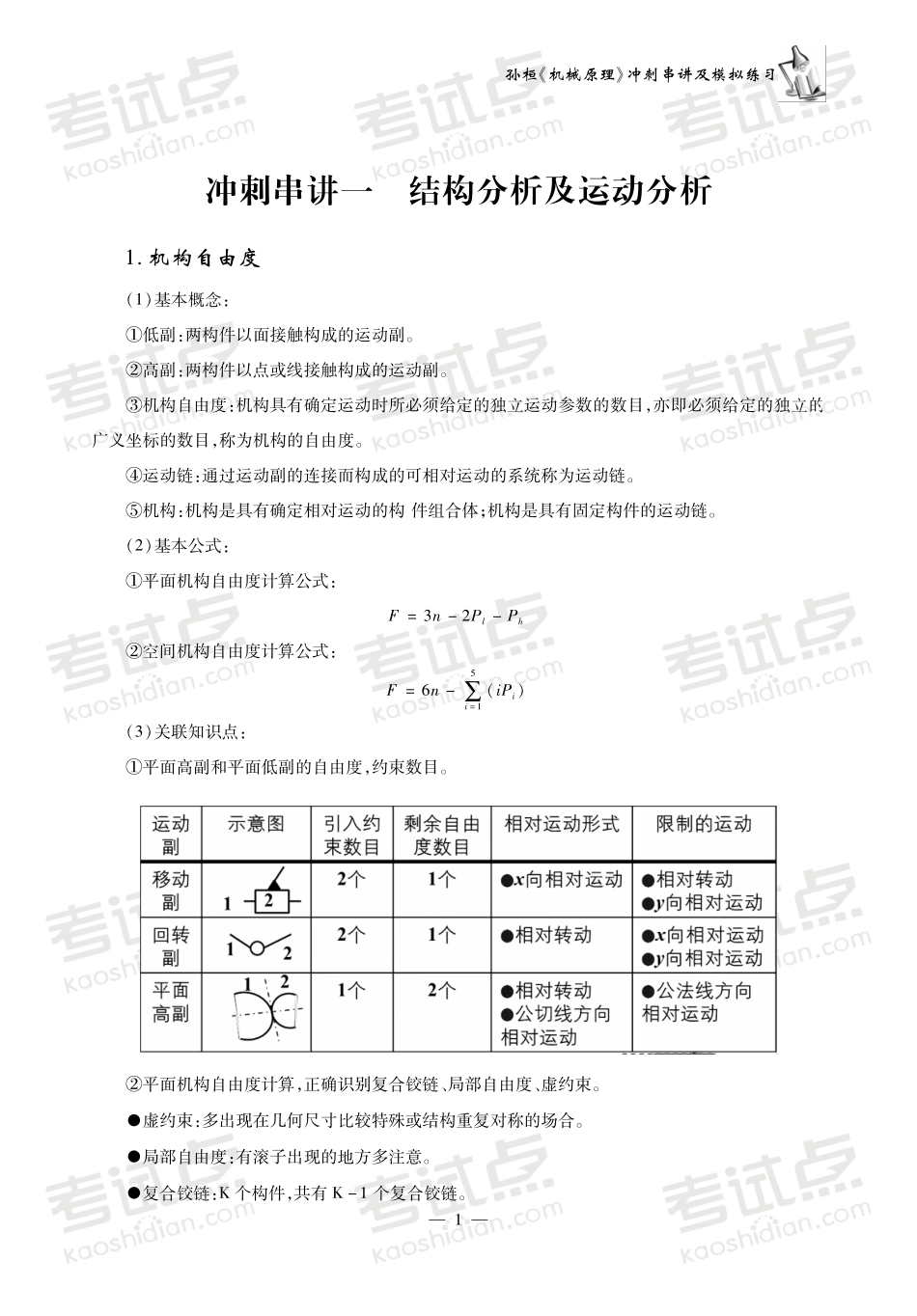
目录冲刺串讲一结构分析及运动分析(1)��������������������������冲刺串讲二受力分析及效率自锁(9)��������������������������冲刺串讲三连杆机构及凸轮机构(16)�������������������������冲刺串讲四齿轮结构及轮系(23)���������������������������冲刺串讲五机械平衡与速度波动调节及其他结构(32)������������������《机械原理》考研模拟试题一(39)���������������������������《机械原理》考研模拟试题二(43)���������������������������《机械原理》考研模拟试题三(48)���������������������������《机械原理》考研模拟试题四(53)���������������������������《机械原理》考研模拟试题五(58)���������������������������冲刺串讲一结构分析及运动分析1.机构自由度(1)基本概念:①低副:两构件以面接触构成的运动副。②高副:两构件以点或线接触构成的运动副。③机构自由度:机构具有确定运动时所必须给定的独立运动参数的数目,亦即必须给定的独立的广义坐标的数目,称为机构的自由度。④运动链:通过运动副的连接而构成的可相对运动的系统称为运动链。⑤机构:机构是具有确定相对运动的构件组合体;机构是具有固定构件的运动链。(2)基本公式:①平面机构自由度计算公式:F=3n-2Pl-Ph②空间机构自由度计算公式:F=6n-∑5i=1(iPi)(3)关联知识点:①平面高副和平面低副的自由度,约束数目。②平面机构自由度计算,正确识别复合铰链、局部自由度、虚约束。●虚约束:多出现在几何尺寸比较特殊或结构重复对称的场合。●局部自由度:有滚子出现的地方多注意。●复合铰链:K个构件,共有K-1个复合铰链。—1—孙桓《机械原理》冲刺串讲及模拟练习例1③虚约束、局部自由度的对机构性能的影响。●机构中的虚约束可以改善机构的受力情况,增加机构的刚度,在连杆机构中,虚约束还可以使机构顺利通过死点或机构运行部确定点,对机构的运动是有利的。●但是,机构中的虚约束都是在特定几何条件下出现的,当不满足这些几何条件时,虚约束将变成实际的有效约束,从而影响机构运动的灵活性,严重时...