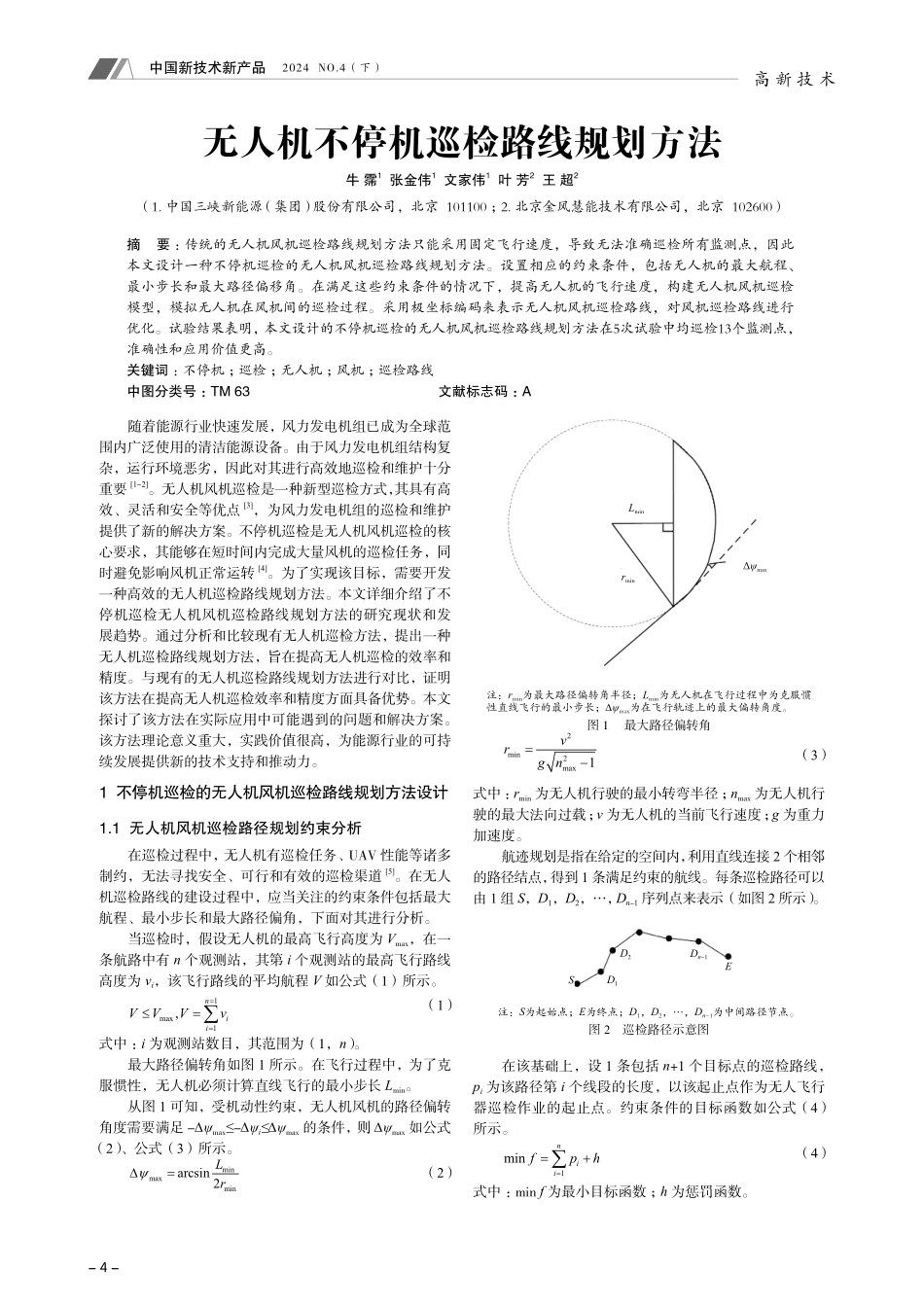
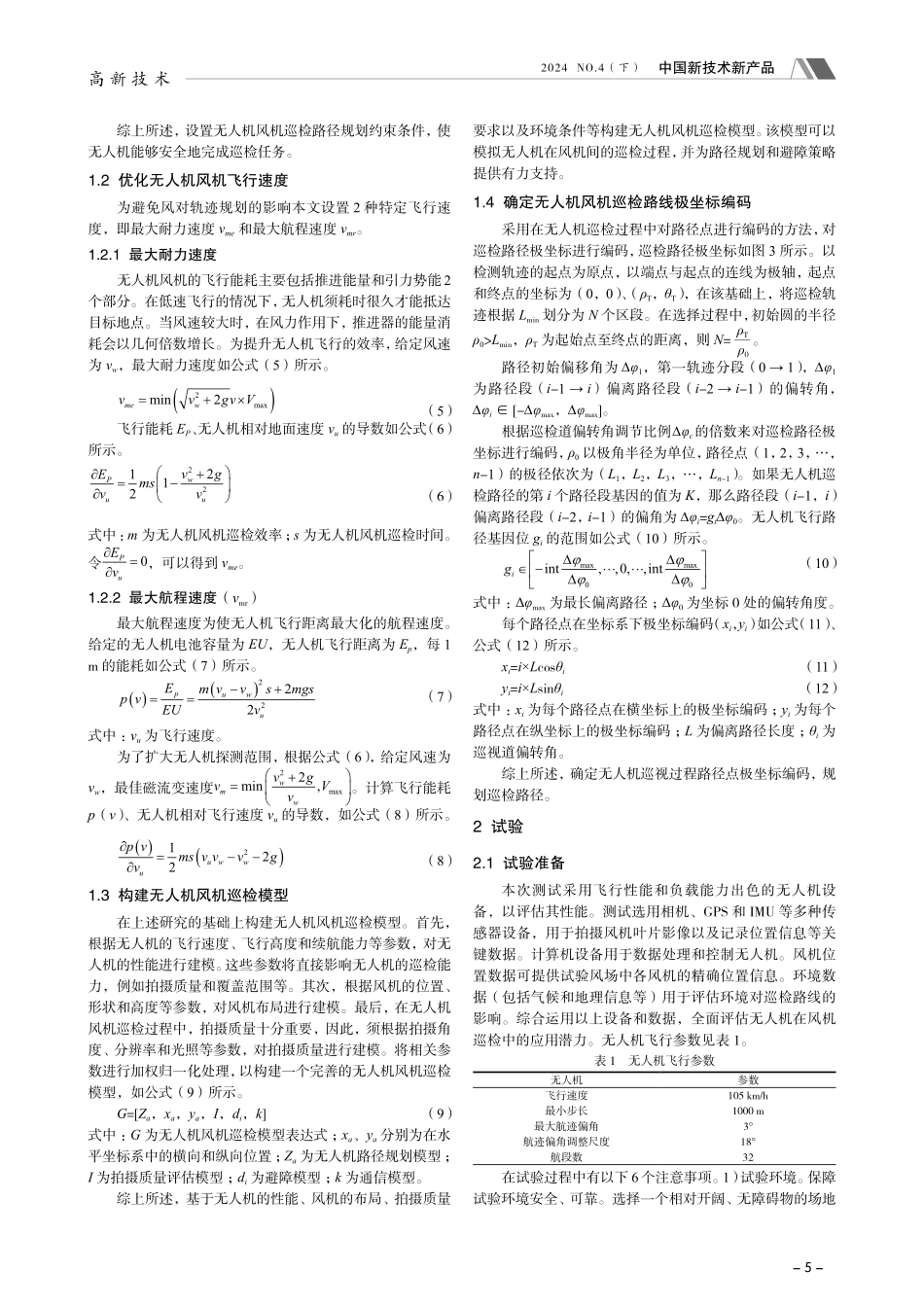
中国新技术新产品2024NO.4(下)-4-高新技术随着能源行业快速发展,风力发电机组已成为全球范围内广泛使用的清洁能源设备。由于风力发电机组结构复杂,运行环境恶劣,因此对其进行高效地巡检和维护十分重要[1-2]。无人机风机巡检是一种新型巡检方式,其具有高效、灵活和安全等优点[3],为风力发电机组的巡检和维护提供了新的解决方案。不停机巡检是无人机风机巡检的核心要求,其能够在短时间内完成大量风机的巡检任务,同时避免影响风机正常运转[4]。为了实现该目标,需要开发一种高效的无人机巡检路线规划方法。本文详细介绍了不停机巡检无人机风机巡检路线规划方法的研究现状和发展趋势。通过分析和比较现有无人机巡检方法,提出一种无人机巡检路线规划方法,旨在提高无人机巡检的效率和精度。与现有的无人机巡检路线规划方法进行对比,证明该方法在提高无人机巡检效率和精度方面具备优势。本文探讨了该方法在实际应用中可能遇到的问题和解决方案。该方法理论意义重大,实践价值很高,为能源行业的可持续发展提供新的技术支持和推动力。1不停机巡检的无人机风机巡检路线规划方法设计1.1无人机风机巡检路径规划约束分析在巡检过程中,无人机有巡检任务、UAV性能等诸多制约,无法寻找安全、可行和有效的巡检渠道[5]。在无人机巡检路线的建设过程中,应当关注的约束条件包括最大航程、最小步长和最大路径偏角,下面对其进行分析。当巡检时,假设无人机的最高飞行高度为Vmax,在一条航路中有n个观测站,其第i个观测站的最高飞行路线高度为vi,该飞行路线的平均航程V如公式(1)所示。1max1,niiVVVv==≤=∑(1)式中:i为观测站数目,其范围为(1,n)。最大路径偏转角如图1所示。在飞行过程中,为了克服惯性,无人机必须计算直线飞行的最小步长Lmin。从图1可知,受机动性约束,无人机风机的路径偏转角度需要满足-∆ψmax≤-∆ψi≤∆ψmax的条件,则∆ψmax如公式(2)、公式(3)所示。minmaxminarcsin2Lrψ∆=(2)2min2max1vrgn=−(3)式中:rmin为无人机行驶的最小转弯半径;nmax为无人机行驶的最大法向过载;v为无人机的当前飞行速度;g为重力加速度。航迹规划是指在给定的空间内,利用直线连接2个相邻的路径结点,得到1条满足约束的航线。每条巡检路径可以由1组S,D1,D2,…,Dn-1序列点来表示(如图2所示)。注:S为起始点;E为终点;D1,D2,…,Dn-1为中间路径节点。图2巡检路径示意图SD1D2EDn-1在该基础上,设1条包括n+1个目标点的巡检路...