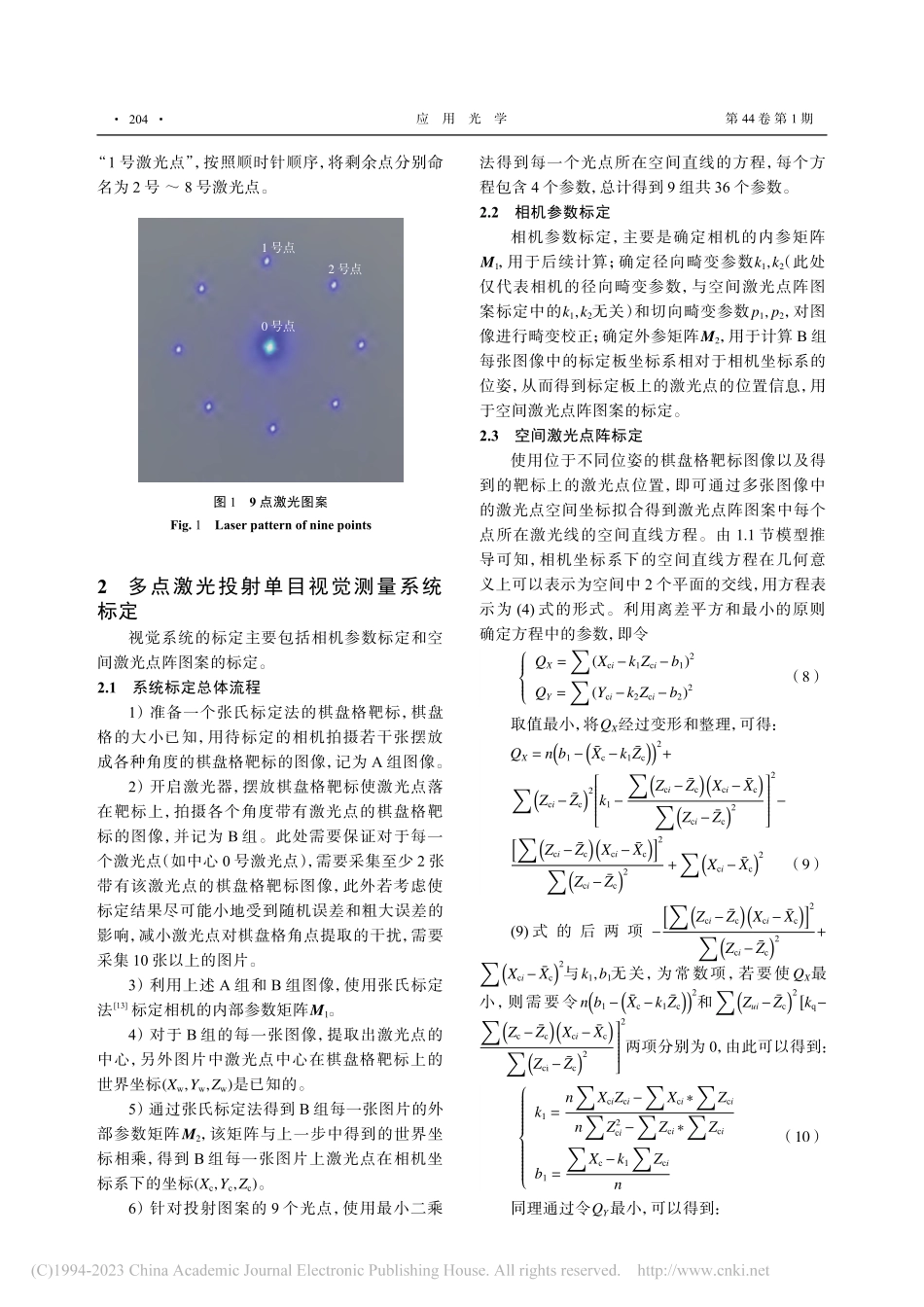
文章编号:1002-2082(2023)01-0202-09单目视觉融合激光投射的无人机障碍探测方法刘峰1,2,汪瓒1,2,王向军1,2(1.天津大学精密测试技术及仪器国家重点实验室,天津300072;2.天津大学微光机电系统技术教育部重点实验室,天津300072)摘要:针对微小型无人机在飞行作业任务中的主动避障需求,提出一种用于微小型无人机避障的、基于单目视觉与主动激光点阵投射的障碍探测方法。使用单目相机采集投射的激光点阵图案,经过图像分割、聚类、质心提取等处理过程,通过像面激光线方程约束快速排除特征一致激光点的歧义,使用激光点探测出无人机前方空间中障碍的方位信息。实验验证装置在基线距离为65mm,工作距离为7m的条件下,障碍探测的相对误差在1.5%以内。该方法精度高、时间复杂度低,可满足低算力的微小型无人机对障碍探测方法的需求,为进一步避障策略的生成提供数据支撑。关键词:障碍探测;微小型无人机;单目视觉;空间方位中图分类号:TN206文献标志码:ADOI:10.5768/JAO202344.0107002ObstaclesdetectionmethodforUAVbasedonmonocularvisionandlaserprojectionLIUFeng1,2,WANGZan1,2,WANGXiangjun1,2(1.StateKeyLaboratoryofPrecisionMeasuringTechnologyandInstruments,TianjinUniversity,Tianjin300072,China;2.KeyLaboratoryofMicroOpticalElectroMechanicalSystemTechnology(MinistryofEducation),TianjinUniversity,Tianjin300072,China)Abstract:Inordertomeettherequirementofactiveobstacleavoidanceofmicrominiatureunmannedaerialvehicle(UAV)inflightmission,anobstaclesdetectionmethodbasedonmonocularvisionandactivelaserlatticeprojectionofmicrominiatureUAVforobstaclesavoidancewasproposed.Theprojectedlaserlatticepatternswerecollectedbyamonocularcamera,andthroughtheprocessesofimagesegmentation,clusteringandcentroidextraction,theambiguityofthecharacteristicconsistentlaserpointwasquicklyeliminatedbytheconstraintofthelaserlineequationoftheimageplane.ThelaserpointswereusedtodetectthedistributionofobstaclesinthefrontspaceoftheUAV.Theexperimentalresultsshowthattherelativeerrorofobstaclesdetectioniswithin1.5%whenthebaselinedistanceis65mmandtheworkingdistanceis7m.Theproposedmethodhashighaccuracyandlowtimecomplexity,andcanmeettherequirementsforobstaclesdetectionmethod...