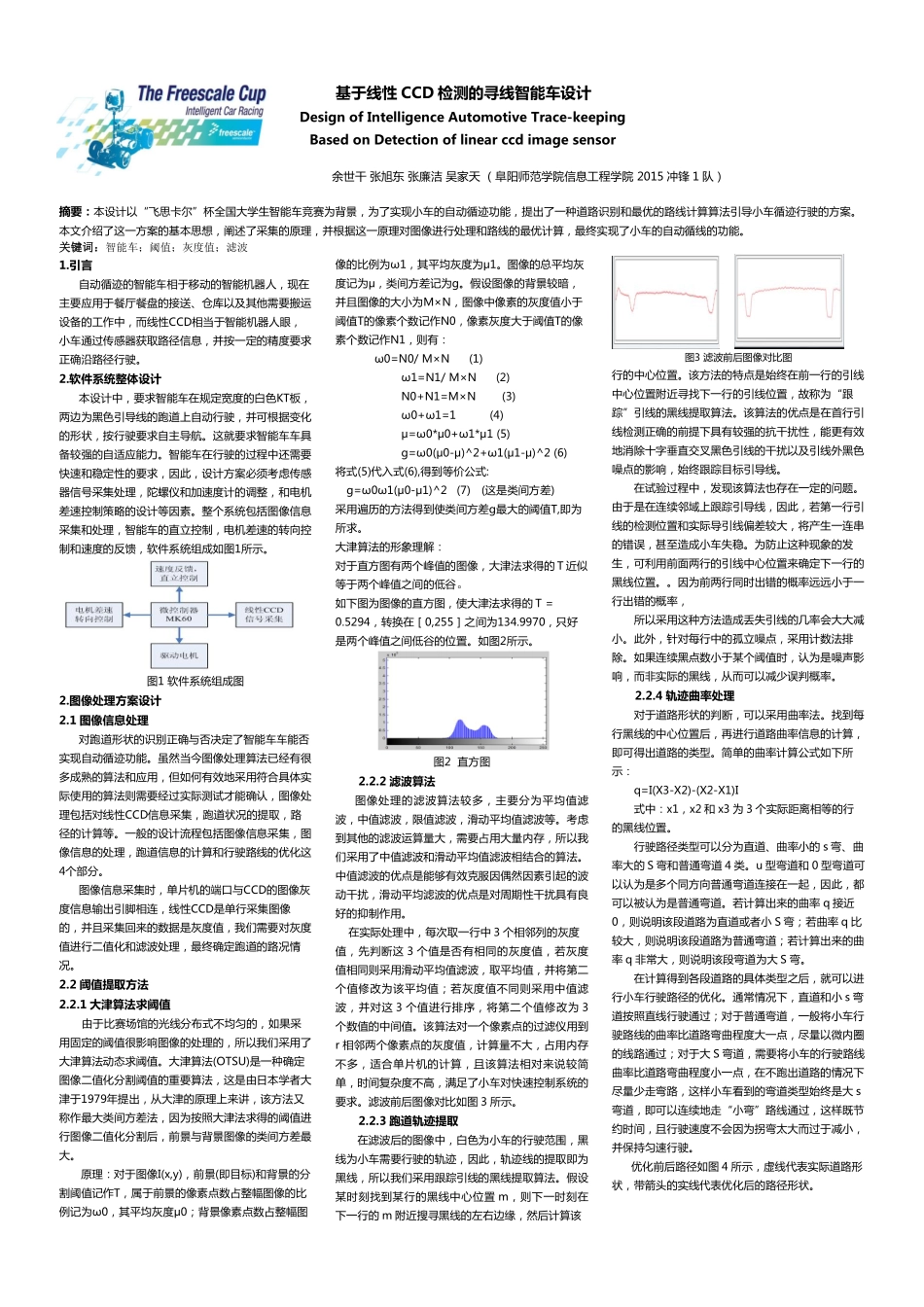
基于线性CCD检测的寻线智能车设计DesignofIntelligenceAutomotiveTrace-keepingBasedonDetectionoflinearccdimagesensor余世干张旭东张廉洁吴家天(阜阳师范学院信息工程学院2015冲锋1队)摘要:本设计以“飞思卡尔”杯全国大学生智能车竞赛为背景,为了实现小车的自动循迹功能,提出了一种道路识别和最优的路线计算算法引导小车循迹行驶的方案。本文介绍了这一方案的基本思想,阐述了采集的原理,并根据这一原理对图像进行处理和路线的最优计算,最终实现了小车的自动循线的功能。关键词:智能车;阈值;灰度值;滤波1.引言自动循迹的智能车相于移动的智能机器人,现在主要应用于餐厅餐盘的接送、仓库以及其他需要搬运设备的工作中,而线性CCD相当于智能机器人眼,小车通过传感器获取路径信息,并按一定的精度要求正确沿路径行驶。2.软件系统整体设计本设计中,要求智能车在规定宽度的白色KT板,两边为黑色引导线的跑道上自动行驶,并可根据变化的形状,按行驶要求自主导航。这就要求智能车车具备较强的自适应能力。智能车在行驶的过程中还需要快速和稳定性的要求,因此,设计方案必须考虑传感器信号采集处理,陀螺仪和加速度计的调整,和电机差速控制策略的设计等因素。整个系统包括图像信息采集和处理,智能车的直立控制,电机差速的转向控制和速度的反馈,软件系统组成如图1所示。图1软件系统组成图2.图像处理方案设计2.1图像信息处理对跑道形状的识别正确与否决定了智能车车能否实现自动循迹功能。虽然当今图像处理算法已经有很多成熟的算法和应用,但如何有效地采用符合具体实际使用的算法则需要经过实际测试才能确认,图像处理包括对线性CCD信息采集,跑道状况的提取,路径的计算等。一般的设计流程包括图像信息采集,图像信息的处理,跑道信息的计算和行驶路线的优化这4个部分。图像信息采集时,单片机的端口与CCD的图像灰度信息输出引脚相连,线性CCD是单行采集图像的,并且采集回来的数据是灰度值,我们需要对灰度值进行二值化和滤波处理,最终确定跑道的路况情况。2.2阈值提取方法2.2.1大津算法求阈值由于比赛场馆的光线分布式不均匀的,如果采用固定的阈值很影响图像的处理的,所以我们采用了大津算法动态求阈值。大津算法(OTSU)是一种确定图像二值化分割阈值的重要算法,这是由日本学者大津于1979年提出,从大津的原理上来讲,该方法又称作最大类间方差法,因为按照大津法求得的阈值进行图像二值化分割后,前景与背景图像的类间方差最...