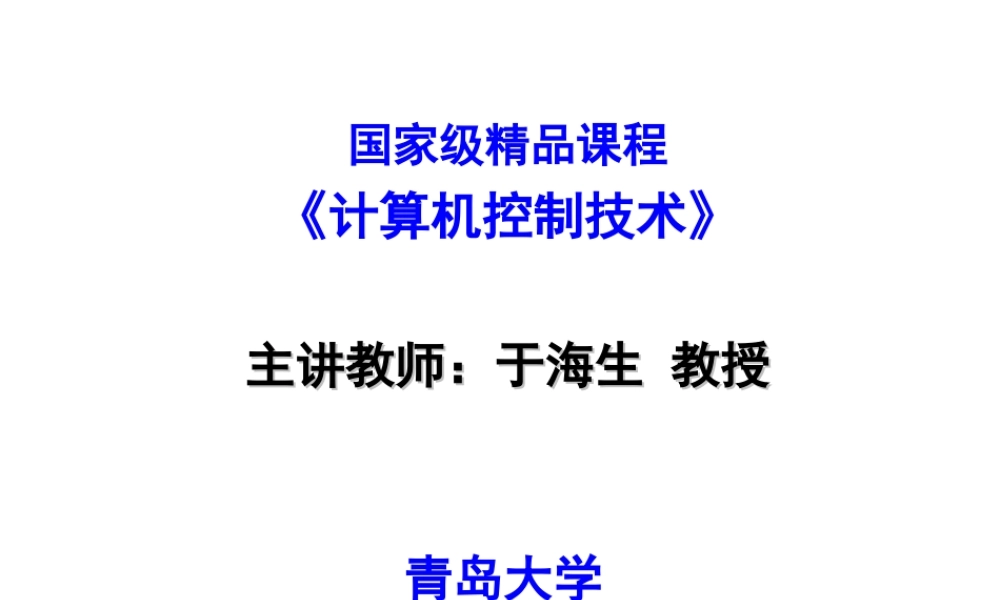
国家级精品课程《计算机控制技术》主讲教师:于海生教授主讲教师:于海生教授青岛大学第40讲课堂专题讨论(二)课堂专题讨论(二)2.讨论课小组报告顺序表3.教师总结1.第1讲时关于讨论课的安排回顾本课程第1讲时关于讨论课的安排:(1)本学期在课程最后,有2讲是讨论课。(2)讨论课内容可以是与本课程相关的大学生创新训练项目、实验室开放项目、参加科研训练项目、第二课堂的设计制作项目、自选项目等。(3)全班同学分成6组,每组设一个组长,配备指导教师(课程组老师)。课后报分组结果。(4)项目答辩。每组由组长代表本组汇报所做工作(10分钟PPT),课程组老师提问,小组回答。(5)答辩结果作为平时成绩一部分。1.第1讲时关于讨论课的安排2.讨论课小组报告顺序表组号题目组员报告人4基于PMAC运动控制卡的伺服系统设计季文伟,刘志欣,陈希强,卢宛林,张亚宁田林5基于RS485总线的分布式数据采集系统刘龙龙,张明凯,朱密,宋超,孙庆国,孙好平王开行王开行6基于组态王和研华ADAM模块的电阻炉温度控制系统周一帆,刘阳,王秀龙,杨振华,刘昌咏,张子平刘帅基于PMAC运动控制卡的伺服系统设计报告人:田林小组成员:季文伟,刘志欣,陈希强,卢宛林,张亚宁《计算机控制技术》课程专题讨论目录前言任务要求方案制定系统硬件的实现系统软件的设计及调试结果总结前言PMAC卡是一种开放型多轴的运动控制器,通过工控机对它通信,完成对电机的多轴运动控制,在现代工业中发挥较大作用。任务要求由于PMAC运动控制卡在现代工业(如雕刻、喷涂、切割等领域)运用较为广泛,我们组的任务目标是通过学习PMAC运动控制卡,利用工控机对它的控制来实现XY两轴伺服电机的运动,绘制所需要的图形。方案设计工控机PMAC运动控制卡伺服驱动器伺服驱动器X轴伺服电机Y轴伺服电机编码器编码器XY平台光栅尺RS232丝杠丝杠系统硬件的实现器件选型:信息处理和控制由PMAC(美国可编程多轴运动控制器PMAC2A-PC104)完成;驱动元件为日本富士伺服驱动器(200W),执行机构是它的配套电机;机械本体为一个两维的X-Y工作平台,是工业应用中最典型的控制对象之一;反馈用检测元件为编码器或者光栅尺(英国雷尼绍,分辨率1微米)。伺服驱动器参数配置MODE/ESC键用来切换操作模式以及退出当前模式。SHIFT/ENT键用来确认参数及操作模式以及修改数值时用来进行移位操作,∧、∨键用来调整数值大小,02号---输入脉冲形式:09号---控制模式切换31号---手动运行速度35号---加速时间...