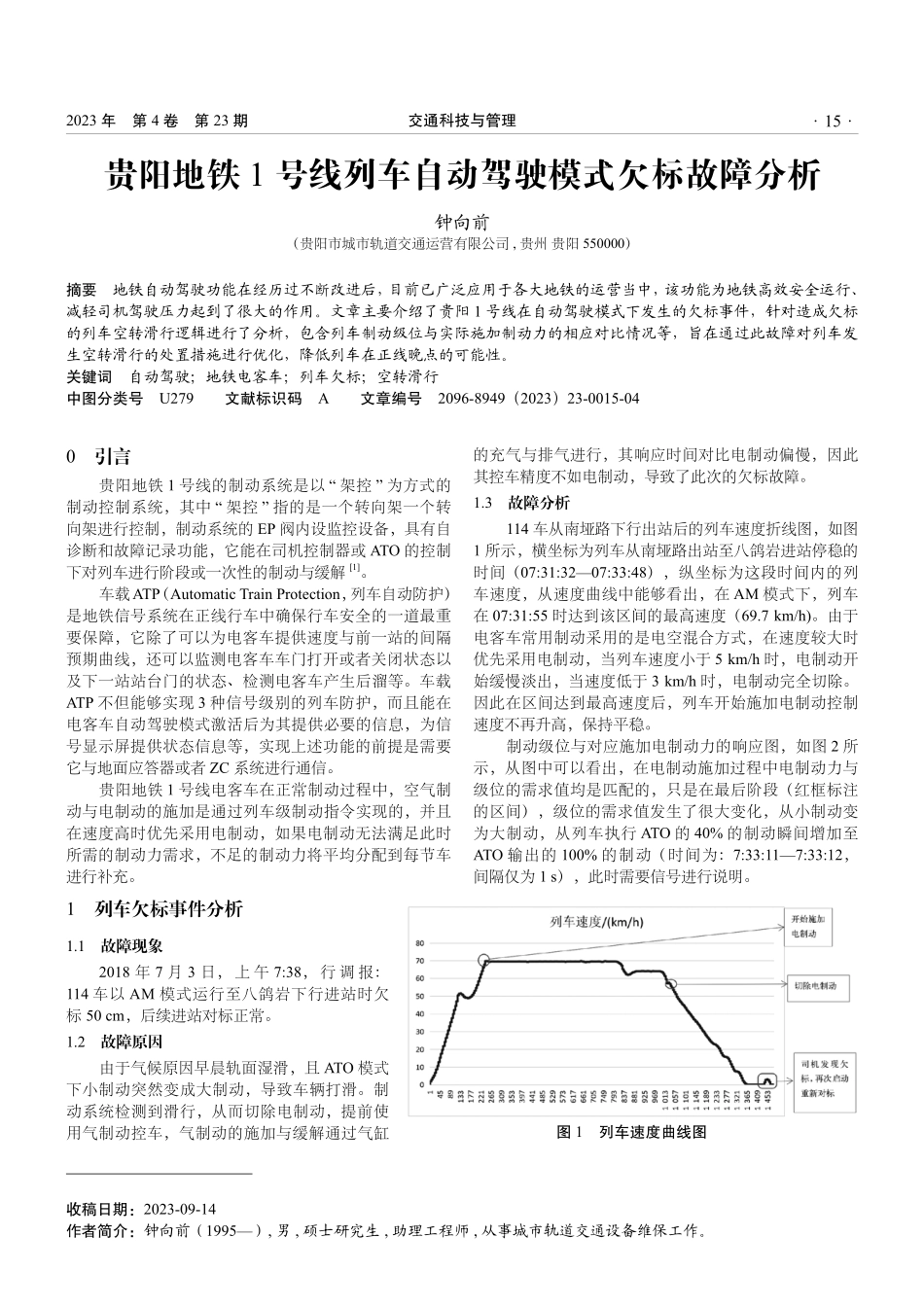
·15·交通科技与管理智慧交通与应用技术0引言贵阳地铁1号线的制动系统是以“架控”为方式的制动控制系统,其中“架控”指的是一个转向架一个转向架进行控制,制动系统的EP阀内设监控设备,具有自诊断和故障记录功能,它能在司机控制器或ATO的控制下对列车进行阶段或一次性的制动与缓解[1]。车载ATP(AutomaticTrainProtection,列车自动防护)是地铁信号系统在正线行车中确保行车安全的一道最重要保障,它除了可以为电客车提供速度与前一站的间隔预期曲线,还可以监测电客车车门打开或者关闭状态以及下一站站台门的状态、检测电客车产生后溜等。车载ATP不但能够实现3种信号级别的列车防护,而且能在电客车自动驾驶模式激活后为其提供必要的信息,为信号显示屏提供状态信息等,实现上述功能的前提是需要它与地面应答器或者ZC系统进行通信。贵阳地铁1号线电客车在正常制动过程中,空气制动与电制动的施加是通过列车级制动指令实现的,并且在速度高时优先采用电制动,如果电制动无法满足此时所需的制动力需求,不足的制动力将平均分配到每节车进行补充。1列车欠标事件分析收稿日期:2023-09-14作者简介:钟向前(1995—),男,硕士研究生,助理工程师,从事城市轨道交通设备维保工作。贵阳地铁1号线列车自动驾驶模式欠标故障分析钟向前(贵阳市城市轨道交通运营有限公司,贵州贵阳550000)摘要地铁自动驾驶功能在经历过不断改进后,目前已广泛应用于各大地铁的运营当中,该功能为地铁高效安全运行、减轻司机驾驶压力起到了很大的作用。文章主要介绍了贵阳1号线在自动驾驶模式下发生的欠标事件,针对造成欠标的列车空转滑行逻辑进行了分析,包含列车制动级位与实际施加制动力的相应对比情况等,旨在通过此故障对列车发生空转滑行的处置措施进行优化,降低列车在正线晚点的可能性。关键词自动驾驶;地铁电客车;列车欠标;空转滑行中图分类号U279文献标识码A文章编号2096-8949(2023)23-0015-04图1列车速度曲线图1.1故障现象2018年7月3日,上午7:38,行调报:114车以AM模式运行至八鸽岩下行进站时欠标50cm,后续进站对标正常。1.2故障原因由于气候原因早晨轨面湿滑,且ATO模式下小制动突然变成大制动,导致车辆打滑。制动系统检测到滑行,从而切除电制动,提前使用气制动控车,气制动的施加与缓解通过气缸的充气与排气进行,其响应时间对比电制动偏慢,因此其控车精度不如电制动,导致了此次的欠标故障。1.3故障分析114车从南垭路下行出站后的列车速度折线...