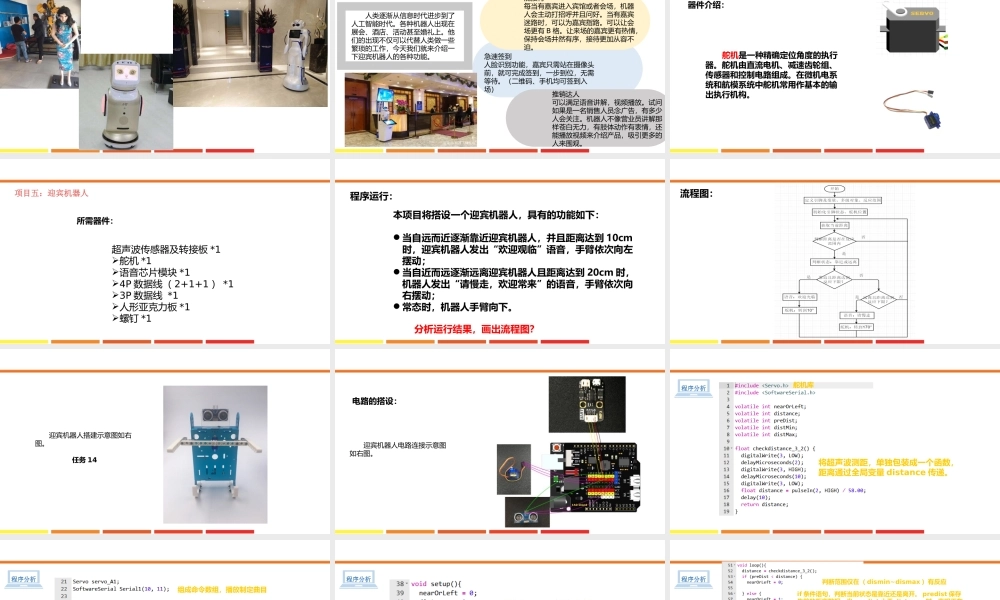
ArduinoUNO---迎宾机器人人类逐渐从信息时代进步到了人工智能时代。各种机器人出现在展会、酒店、活动甚至婚礼上。他们的出现不仅可以代替人类做一些繁琐的工作,今天我们就来介绍一下迎宾机器人的各种功能。能接待每当有嘉宾进入宾馆或者会场,机器人会主动打招呼并且问好。当有嘉宾迷路时,可以为嘉宾指路。可以让会场更有B格。让来场的嘉宾更有热情,保持会场井然有序,接待更加从容不迫。急速签到人脸识别功能,嘉宾只需站在摄像头前,就可完成签到,一步到位,无需等待。(二维码、手机均可签到入场)推销达人可以满足语音讲解,视频播放。试问如果是一名销售人员念广告,有多少人会关注。机器人不像营业员讲解那样苍白无力,有肢体动作有表情,还能播放视频来介绍产品,吸引更多的人来围观。器件介绍:舵机是一种精确定位角度的执行器。舵机由直流电机、减速齿轮组、传感器和控制电路组成。在微机电系统和航模系统中舵机常用作基本的输出执行机构。项目五:迎宾机器人所需器件:超声波传感器及转接板*1舵机*1语音芯片模块*14P数据线(2+1+1)*13P数据线*1人形亚克力板*1螺钉*1程序运行:本项目将搭设一个迎宾机器人,具有的功能如下:当自远而近逐渐靠近迎宾机器人,并且距离达到10cm时,迎宾机器人发出“欢迎观临”语音,手臂依次向左摆动;当自近而远逐渐远离迎宾机器人且距离达到20cm时,机器人发出“请慢走,欢迎常来”的语音,手臂依次向右摆动;常态时,机器人手臂向下。分析运行结果,画出流程图?流程图:迎宾机器人搭建示意图如右图。任务14电路的搭设:迎宾机器人电路连接示意图如右图。程序分析舵机库将超声波测距,单独包装成一个函数,距离通过全局变量distance传递。舵机初始状态为90°,向下。两个舵机在位置初始化的时候,中间延迟了100Ms,尽可能避免两个舵机同时运动,这样会需要更大电流,影响系统的稳定。程序分析组成命令数组,播放制定曲目程序分析初始化变量,D3连接超声波的Trig脚,D2连接Echo脚,舵机连接模拟口A1脚,波特率为9600程序分析判断范围仅在(dismin~dismax)有反应if条件语句,判断当前状态是靠近还是离开。predist保存先前的距离数据,当predist小于distance时,表明正在远离。nerorleft赋值为1,反之为0。处于靠近状态,并且靠近距离达到下限时,触发动作。动作为:播放“欢迎光临”,迎宾机器人双臂挥动,做欢迎状。处于远离状态,并且离开距离达到上限时,触发动作。动作为:播...