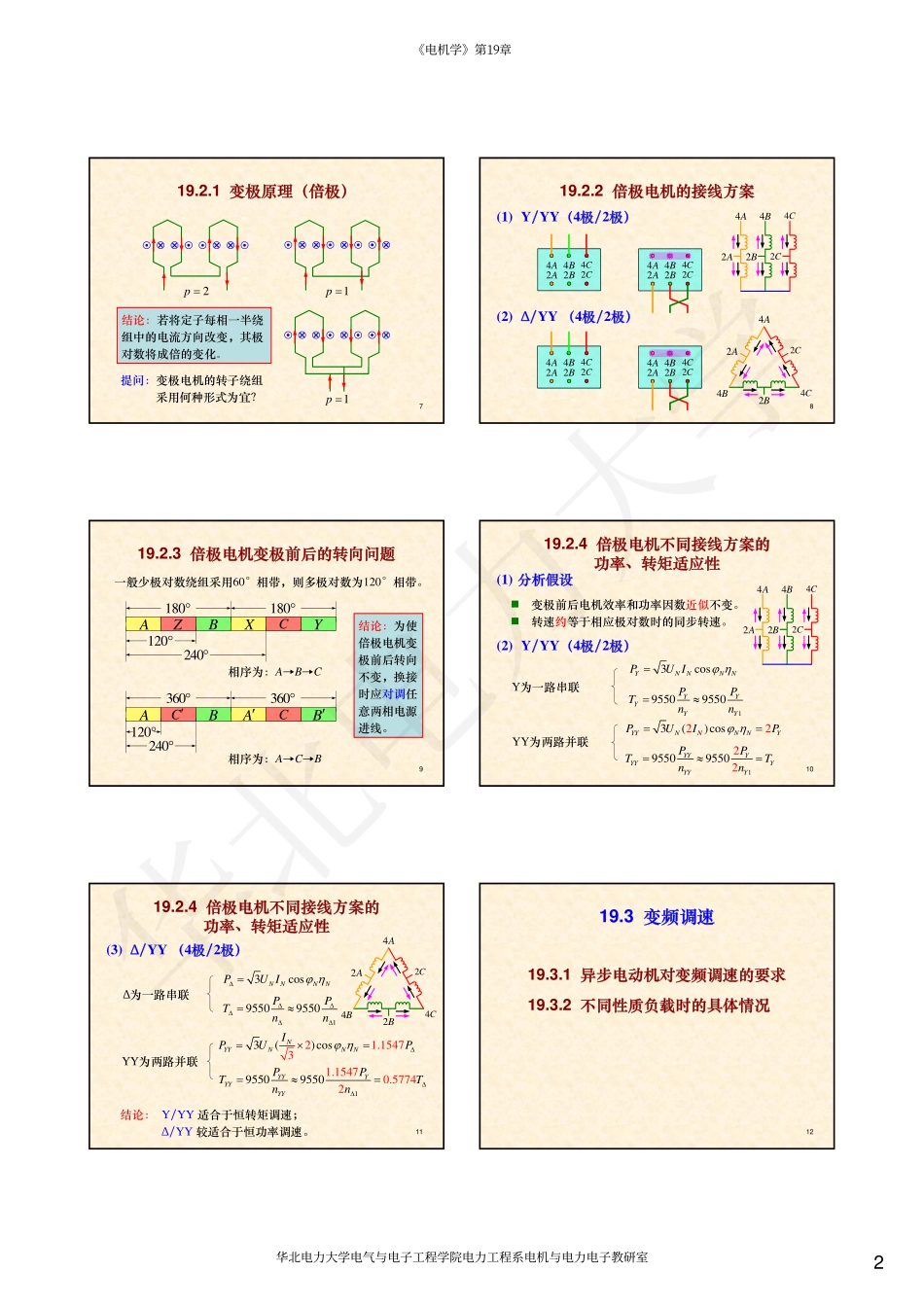
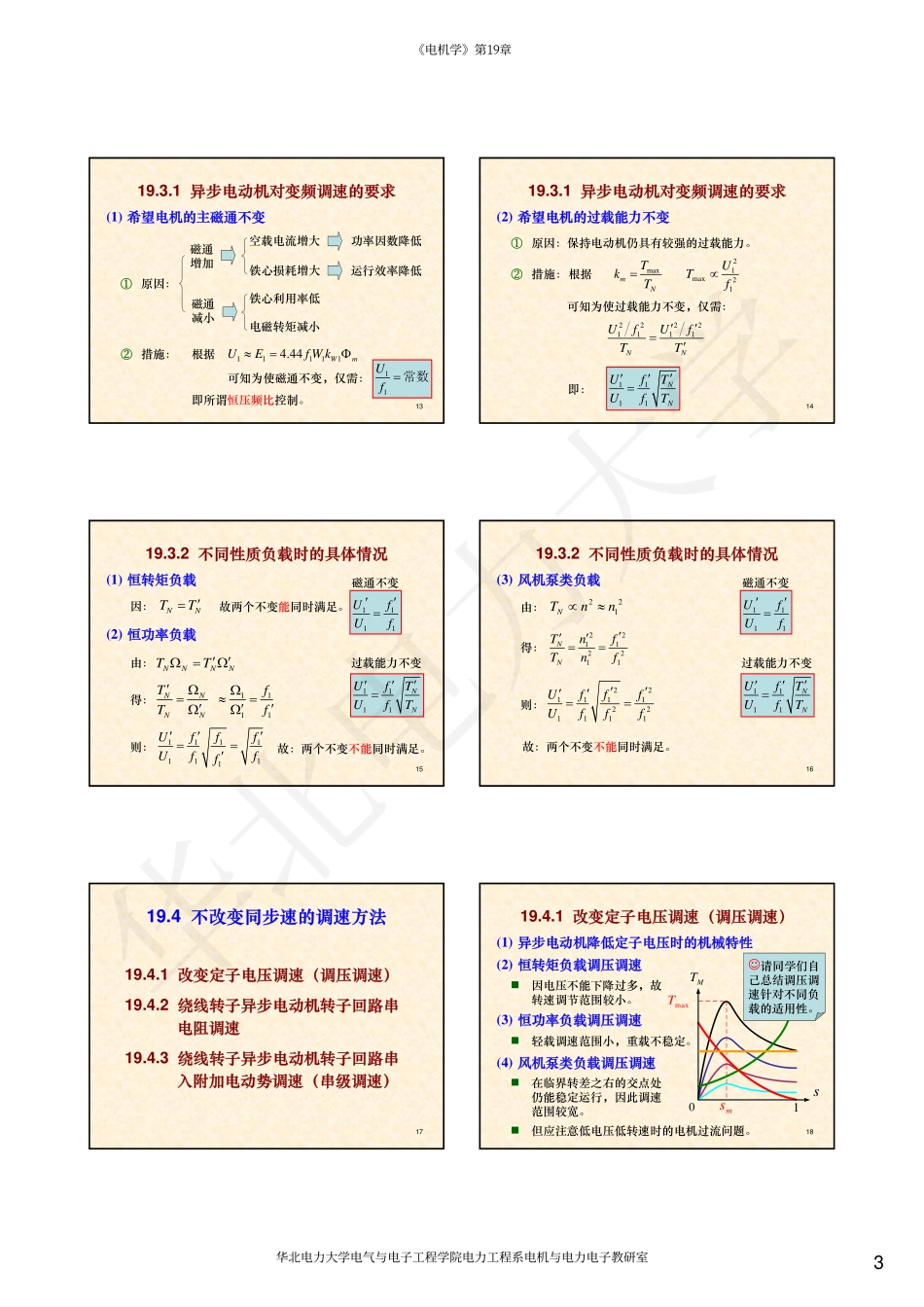
1119.1概述19.2变极调速19.3变频调速19.4不改变同步速的调速方法第19章三相异步电动机的调速219.1概述19.1.1旋转设备调速的目的及方式19.1.2异步电动机的传统调速方法19.1.3常见负载分类及其特性曲线319.1.1旋转设备调速的目的及方式(1)调速的目的(2)旋转设备速度调节的基本方式①产品质量的需求。②节能降耗的需求。③提高劳动生产率的需求。④日常生活的需求。①采用机械方式,如齿轮传动、皮带传动和链条传动等。②采用电气方式,即改变电动机的电气量或参数,达到调速的目的。419.1.2异步电动机的传统调速方法(1)异步电动机的转速公式(2)改变同步速度的调速方法(3)不改变同步速度的调速方法1160(1)(1)fnsnsp×=−×=−×①变极调速(有级调速)。②变频调速(无级调速)。①改变输入电压调速(调压调速)。②绕线转子异步电动机转子回路串电阻调速。③绕线转子异步电动机转子回路串电势调速(串级调速)。512Ts021(1)Ts∝−19.1.3常见负载分类及其特性曲线(1)恒转矩负载(2)恒功率负载(3)风机泵类负载如起重机、电梯等。2T=常数22PT=×Ω2260nTπ=×122(1)60nTsπ=××−=常数故:21(1)Ts∝−如金属切削机床。222(1)Tns∝∝−如离心式水泵、鼓风机和电风扇等。2T=常数22(1)Ts∝−619.2变极调速19.2.1变极原理(倍极)19.2.2倍极电机的接线方案19.2.3倍极电机变极前后的转向问题19.2.4倍极电机不同接线方案的功率、转矩适应性《电机学》第19章华北电力大学电气与电子工程学院电力工程系电机与电力电子教研室华北电力大学2719.2.1变极原理(倍极)2p=1p=1p=结论:若将定子每相一半绕组中的电流方向改变,其极对数将成倍的变化。提问:变极电机的转子绕组采用何种形式为宜?819.2.2倍极电机的接线方案(1)Y/YY(4极/2极)(2)∆/YY(4极/2极)2A4A4B4C2B2C4A4B4C2A2B2C4B4C4A2C2A2B4B4C4A2C2A2B4B4C4A2C2A2B4B4C4A2C2A2B919.2.3倍极电机变极前后的转向问题一般少极对数绕组采用60°相带,则多极对数为120°相带。AZYCXB180°180°120°240°相序为:A→B→CAC′B′CA′B360°360°120°240°相序为:A→C→B结论:为使倍极电机变极前后转向不变,换接时应对调任意两相电源进线。1019.2.4倍极电机不同接线方案的功率、转矩适应性(2)Y/YY(4极/2极)2A4A4B4C2B2C�变极前后电机效率和功率因数近似不变。�转速约等于相应极对数时的同步转速。Y为一路串联YY为两路并联3cosYNNNNPUIϕη=195509550YYYYYPPTnn=≈3()cos22YYNNNNYPUIPϕη==19595250502YYYYY...