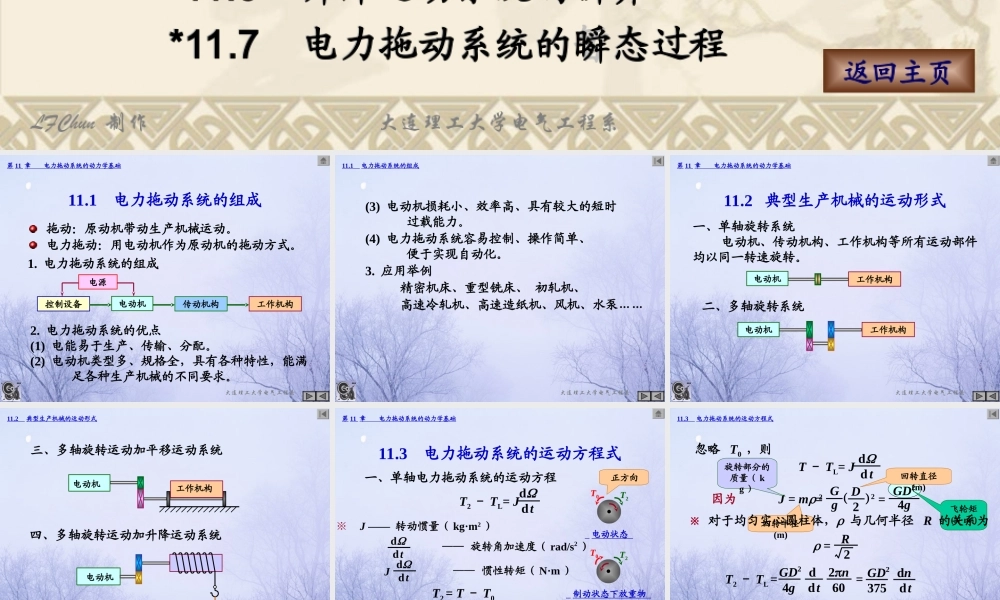
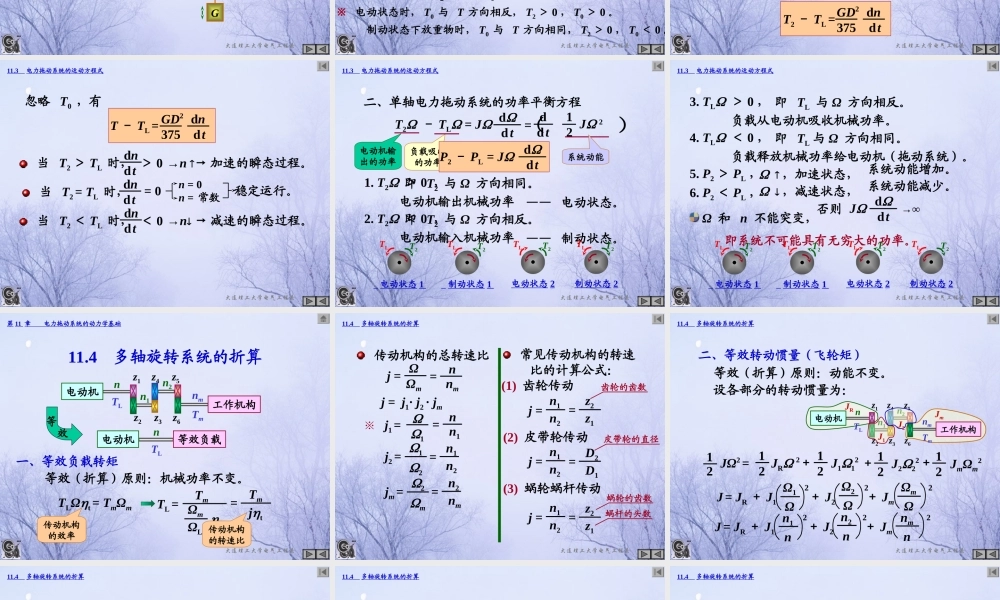
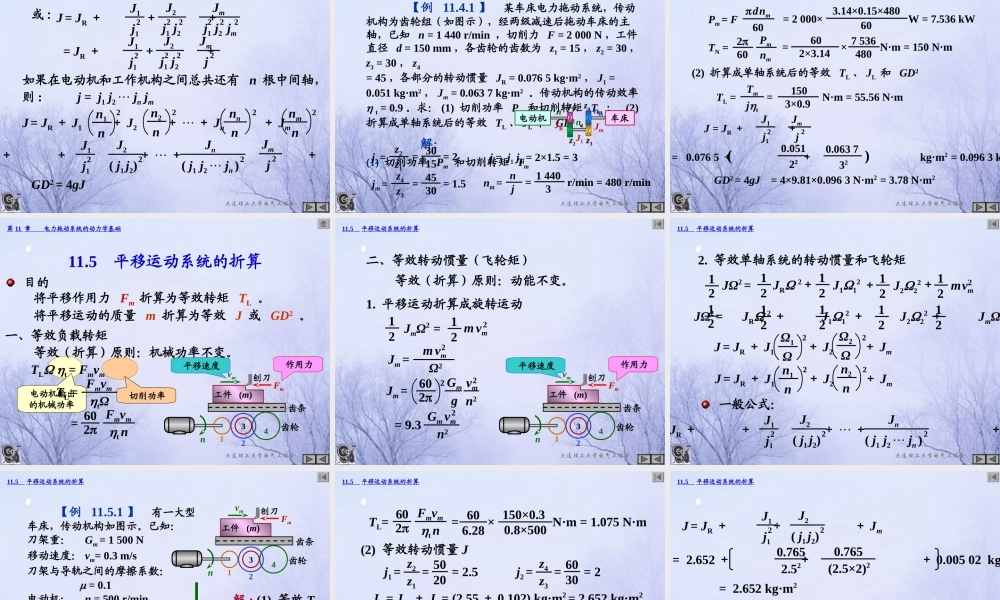
LFChun制作大连理工大学电气工程系第11章电力拖动系统的动力学基础11.1电力拖动系统的组成11.2典型生产机械的运动形式11.3电力拖动系统的运动方程11.4多轴旋转系统的折算11.5平移运动系统的折算*11.7电力拖动系统的暂态过程11.6升降运动系统的折算第第1111章电力拖动系统章电力拖动系统的动力学基础的动力学基础11.1电力拖动系统的组成11.2典型生产机械的运动形式11.3电力拖动系统的运动方程11.4多轴旋转系统的折算11.5平移运动系统的折算*11.7电力拖动系统的瞬态过程11.6升降运动系统的折算电机与拖动返回主页大连理工大学电气工程系11.1电力拖动系统的组成拖动:原动机带动生产机械运动。电力拖动:用电动机作为原动机的拖动方式。1.电力拖动系统的组成电动机传动机构工作机构控制设备电源2.电力拖动系统的优点(1)电能易于生产、传输、分配。(2)电动机类型多、规格全,具有各种特性,能满足各种生产机械的不同要求。第11章电力拖动系统的动力学基础大连理工大学电气工程系(3)电动机损耗小、效率高、具有较大的短时过载能力。(4)电力拖动系统容易控制、操作简单、便于实现自动化。3.应用举例精密机床、重型铣床、初轧机、高速冷轧机、高速造纸机、风机、水泵……11.1电力拖动系统的组成大连理工大学电气工程系11.2典型生产机械的运动形式一、单轴旋转系统电动机、传动机构、工作机构等所有运动部件均以同一转速旋转。二、多轴旋转系统第11章电力拖动系统的动力学基础电动机工作机构电动机工作机构大连理工大学电气工程系三、多轴旋转运动加平移运动系统四、多轴旋转运动加升降运动系统11.2典型生产机械的运动形式电动机工作机构电动机G大连理工大学电气工程系11.3电力拖动系统的运动方程式一、单轴电力拖动系统的运动方程T2-TL=Jddt※J——转动惯量(kg·m2)——旋转角加速度(rad/s2)——惯性转矩(N·m)T2=T-T0※电动状态时,T0与T方向相反,T2>0,T0>0。制动状态下放重物时,T0与T方向相同,T2>0,T0<0。第11章电力拖动系统的动力学基础ddtJddt电动状态T2T0制动状态下放重物T2T0正方向大连理工大学电气工程系11.3电力拖动系统的运动方程式T-TL=Jddt忽略T0,则飞轮矩(N·m2)因为J=m2Gg=D2()2GD24g=旋转部分的质量(kg)回转半径(m)2n60T2-TL=GD2d4gdt回转直径(m)※对于均匀实心圆柱体,与几何半径R的关系为R2==GD2dn375dtGD2dn375dtT2-TL=大连理工大学电气工程系11.3电力拖动系统的运动方程式GD2dn375dtT-TL=忽...