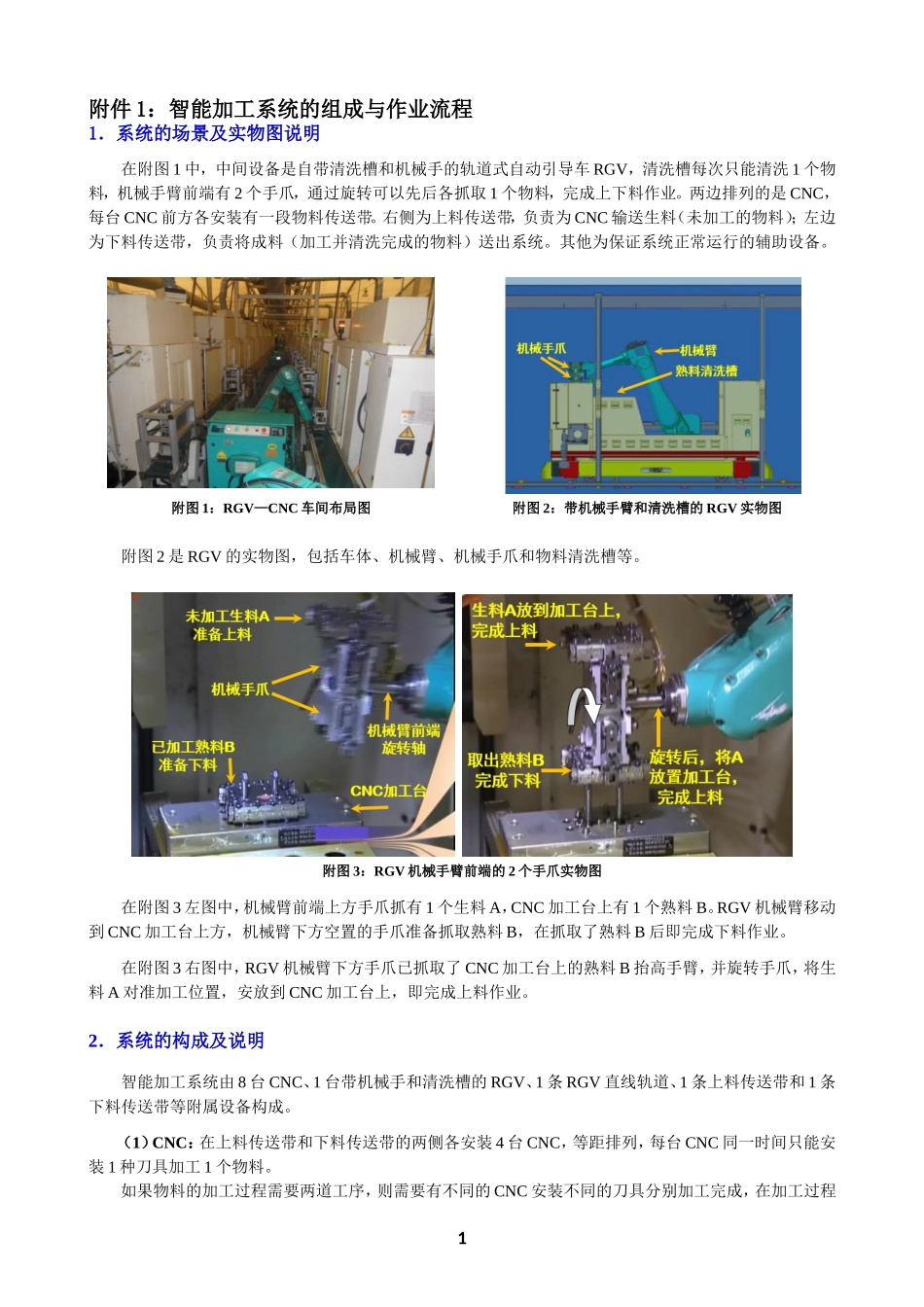
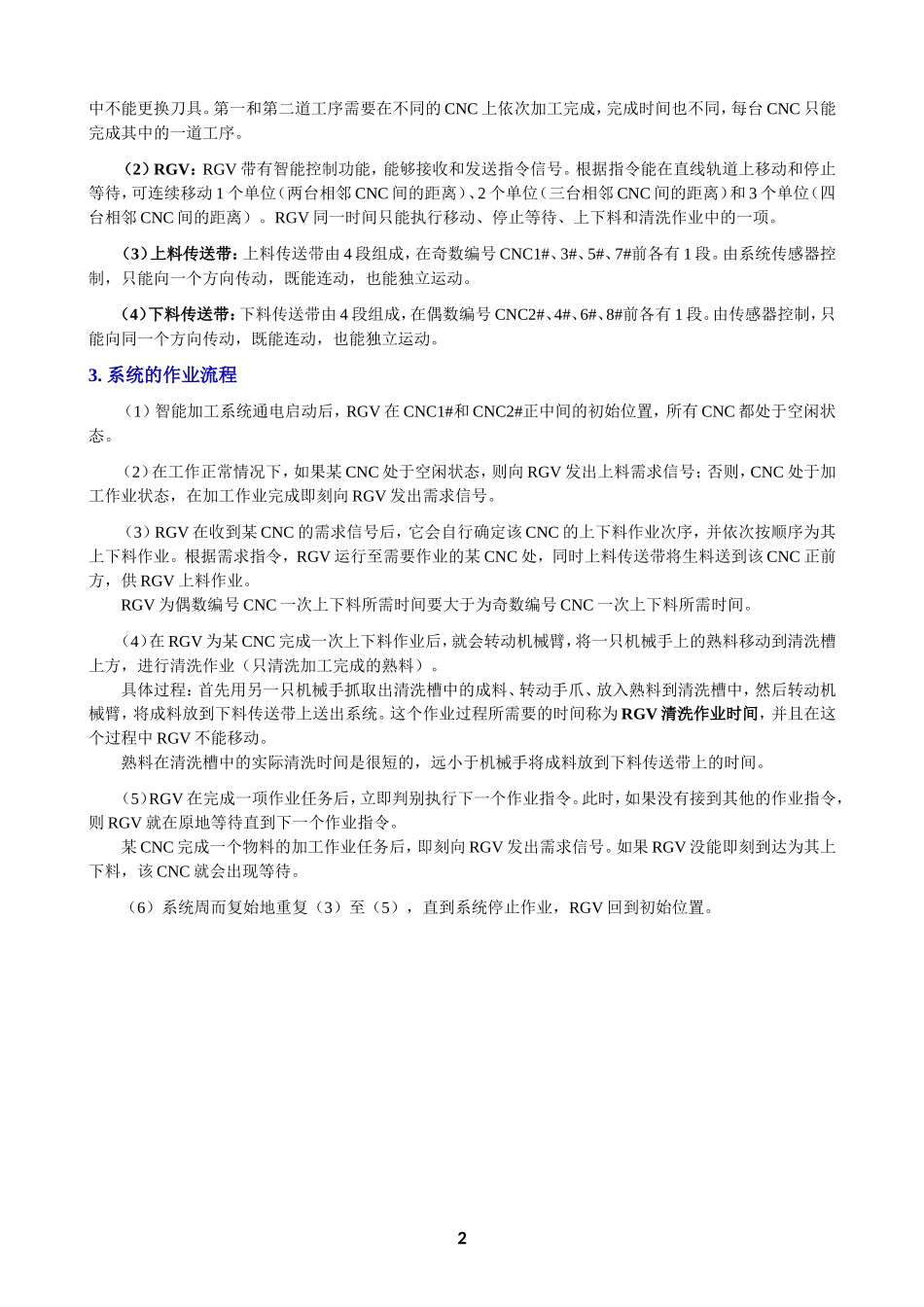
附件1:智能加工系统的组成与作业流程1.系统的场景及实物图说明在附图1中,中间设备是自带清洗槽和机械手的轨道式自动引导车RGV,清洗槽每次只能清洗1个物料,机械手臂前端有2个手爪,通过旋转可以先后各抓取1个物料,完成上下料作业。两边排列的是CNC,每台CNC前方各安装有一段物料传送带。右侧为上料传送带,负责为CNC输送生料(未加工的物料);左边为下料传送带,负责将成料(加工并清洗完成的物料)送出系统。其他为保证系统正常运行的辅助设备。附图1:RGV—CNC车间布局图附图2:带机械手臂和清洗槽的RGV实物图附图2是RGV的实物图,包括车体、机械臂、机械手爪和物料清洗槽等。附图3:RGV机械手臂前端的2个手爪实物图在附图3左图中,机械臂前端上方手爪抓有1个生料A,CNC加工台上有1个熟料B。RGV机械臂移动到CNC加工台上方,机械臂下方空置的手爪准备抓取熟料B,在抓取了熟料B后即完成下料作业。在附图3右图中,RGV机械臂下方手爪已抓取了CNC加工台上的熟料B抬高手臂,并旋转手爪,将生料A对准加工位置,安放到CNC加工台上,即完成上料作业。2.系统的构成及说明智能加工系统由8台CNC、1台带机械手和清洗槽的RGV、1条RGV直线轨道、1条上料传送带和1条下料传送带等附属设备构成。(1)CNC:在上料传送带和下料传送带的两侧各安装4台CNC,等距排列,每台CNC同一时间只能安装1种刀具加工1个物料。如果物料的加工过程需要两道工序,则需要有不同的CNC安装不同的刀具分别加工完成,在加工过程1中不能更换刀具。第一和第二道工序需要在不同的CNC上依次加工完成,完成时间也不同,每台CNC只能完成其中的一道工序。(2)RGV:RGV带有智能控制功能,能够接收和发送指令信号。根据指令能在直线轨道上移动和停止等待,可连续移动1个单位(两台相邻CNC间的距离)、2个单位(三台相邻CNC间的距离)和3个单位(四台相邻CNC间的距离)。RGV同一时间只能执行移动、停止等待、上下料和清洗作业中的一项。(3)上料传送带:上料传送带由4段组成,在奇数编号CNC1#、3#、5#、7#前各有1段。由系统传感器控制,只能向一个方向传动,既能连动,也能独立运动。(4)下料传送带:下料传送带由4段组成,在偶数编号CNC2#、4#、6#、8#前各有1段。由传感器控制,只能向同一个方向传动,既能连动,也能独立运动。3.系统的作业流程(1)智能加工系统通电启动后,RGV在CNC1#和CNC2#正中间的初始位置,所有CNC都处于空闲状态。(2)在工作正常情况下,如果某CNC处于空闲状态,...