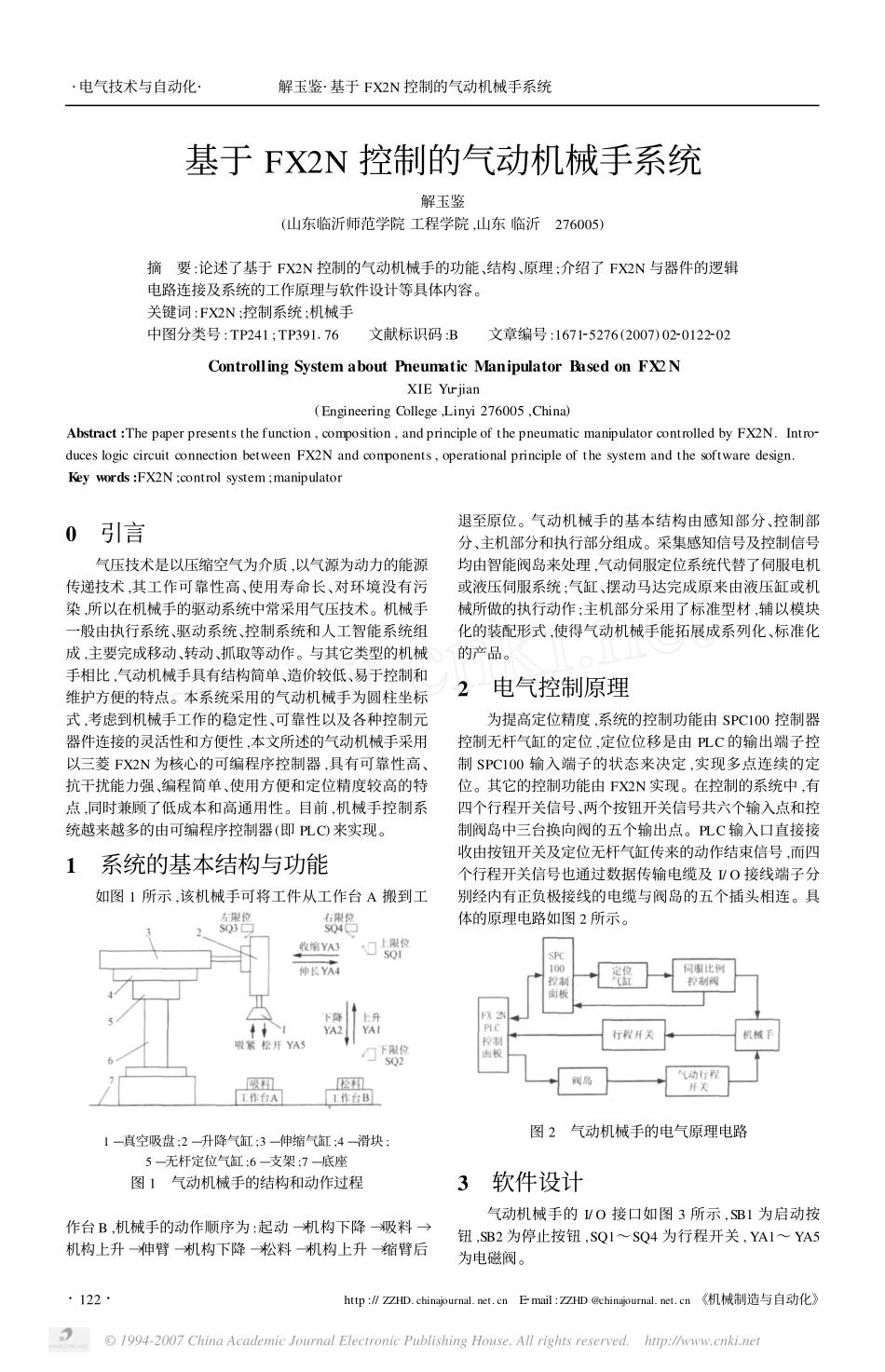
基于FX2N控制的气动机械手系统解玉鉴(山东临沂师范学院工程学院,山东临沂276005)摘要:论述了基于FX2N控制的气动机械手的功能、结构、原理;介绍了FX2N与器件的逻辑电路连接及系统的工作原理与软件设计等具体内容。关键词:FX2N;控制系统;机械手中图分类号:TP241;TP391176文献标识码:B文章编号:167125276(2007)0220122202ControllingSystemaboutPneumaticManipulatorBasedonFX2NXIEYu2jian(EngineeringCollege,Linyi276005,China)Abstract:Thepaperpresentsthefunction,composition,andprincipleofthepneumaticmanipulatorcontrolledbyFX2N.Intro2duceslogiccircuitconnectionbetweenFX2Nandcomponents,operationalprincipleofthesystemandthesoftwaredesign.Keywords:FX2N;controlsystem;manipulator0引言气压技术是以压缩空气为介质,以气源为动力的能源传递技术,其工作可靠性高、使用寿命长、对环境没有污染,所以在机械手的驱动系统中常采用气压技术。机械手一般由执行系统、驱动系统、控制系统和人工智能系统组成,主要完成移动、转动、抓取等动作。与其它类型的机械手相比,气动机械手具有结构简单、造价较低、易于控制和维护方便的特点。本系统采用的气动机械手为圆柱坐标式,考虑到机械手工作的稳定性、可靠性以及各种控制元器件连接的灵活性和方便性,本文所述的气动机械手采用以三菱FX2N为核心的可编程序控制器,具有可靠性高、抗干扰能力强、编程简单、使用方便和定位精度较高的特点,同时兼顾了低成本和高通用性。目前,机械手控制系统越来越多的由可编程序控制器(即PLC)来实现。1系统的基本结构与功能如图1所示,该机械手可将工件从工作台A搬到工1—真空吸盘;2—升降气缸;3—伸缩气缸;4—滑块;5—无杆定位气缸;6—支架;7—底座图1气动机械手的结构和动作过程作台B,机械手的动作顺序为:起动→机构下降→吸料→机构上升→伸臂→机构下降→松料→机构上升→缩臂后退至原位。气动机械手的基本结构由感知部分、控制部分、主机部分和执行部分组成。采集感知信号及控制信号均由智能阀岛来处理,气动伺服定位系统代替了伺服电机或液压伺服系统;气缸、摆动马达完成原来由液压缸或机械所做的执行动作;主机部分采用了标准型材,辅以模块化的装配形式,使得气动机械手能拓展成系列化、标准化的产品。2电气控制原理为提高定位精度,系统的控制功能由SPC100控制器控制无杆气缸的定位,定位位移是由PLC的输出端子控制SPC100输入端子的状态来决定,实现多点连续的定位。其...