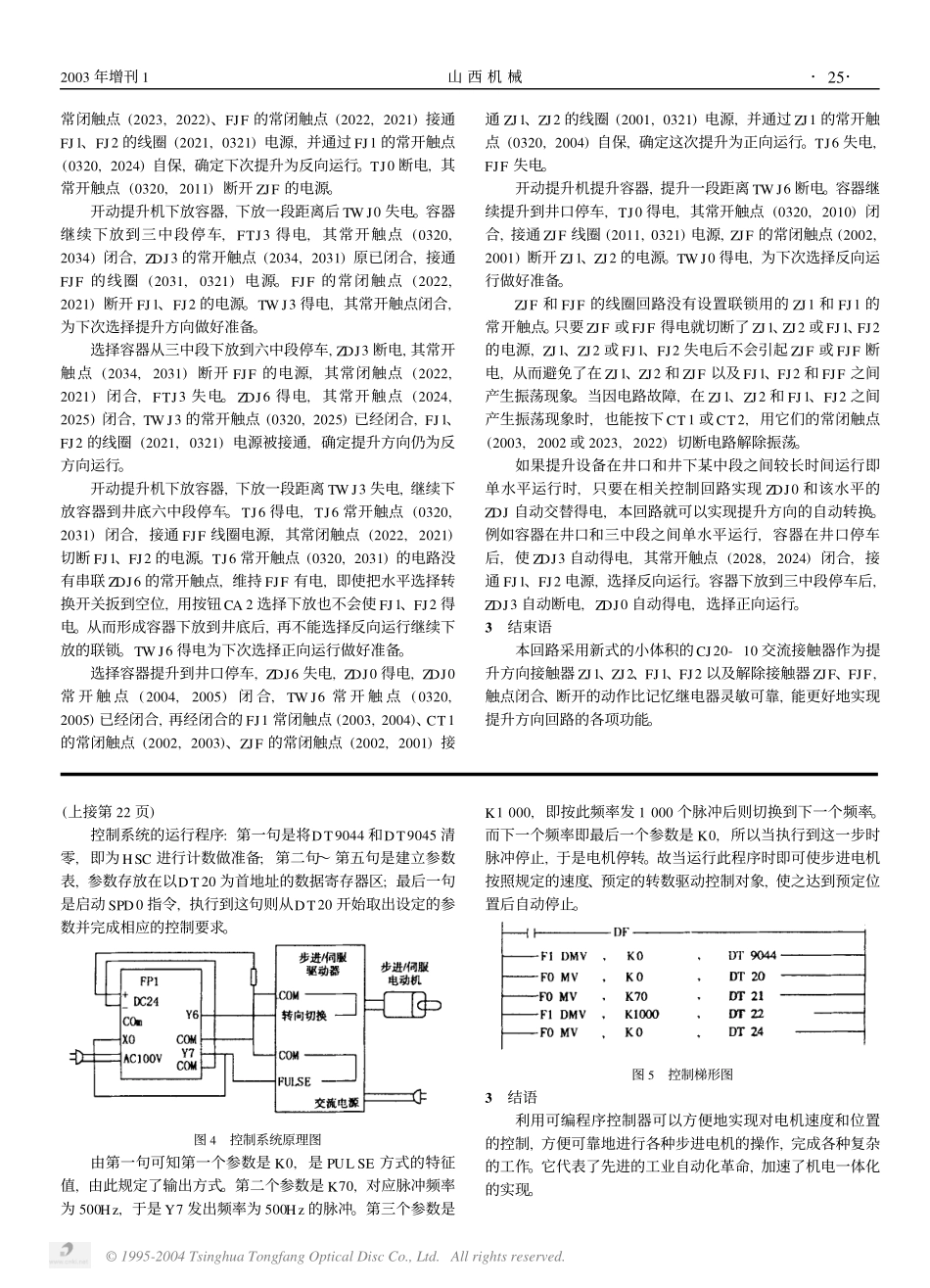
PLC控制步进电机方法的研究朱力(山西省机电设计研究院,山西太原030009)摘要:介绍了运用PLC控制步进电机速度和位置的开发研制思路及软硬件构成。关键词:PLC;步进电机;控制作者简介:朱力(19632),男,山西省太原市人,工程师,1986年毕业于大连铁道学院,本科。0引言随着微电子技术和计算机技术的发展,可编程序控制器有了突飞猛进的发展,其功能已远远超出了逻辑控制、顺序控制的范围,它与计算机有效结合,可进行模拟量控制,具有远程通信功能等。有人将其称为现代工业控制的三大支柱(即PLC,机器人,CAD�CAM)之一。目前可编程序控制器(ProgrammableController)简称PLC已广泛应用于冶金、矿业、机械、轻工等领域,为工业自动化提供了有力的工具。1PLC的基本结构PLC采用了典型的计算机结构,主要包括CPU、RAM、ROM和输入�输出接口电路等。如果把PLC看作一个系统,该系统由输入变量-PLC-输出变量组成,外部的各种开关信号、模拟信号、传感器检测的信号均作为PLC的输入变量,它们经PLC外部端子输入到内部寄存器中,经PLC内部逻辑运算或其它各种运算、处理后送到输出端子,它们是PLC的输出变量,由这些输出变量对外围设备进行各种控制。2控制方法及研究211FP1的特殊功能简介21111脉冲输出FP1的输出端Y7可输出脉冲,脉冲频率可通过软件编程进行调节,其输出频率范围为360Hz~5kHz。21112高速计数器(HSC)FP1内部有高速计数器,可同时输入两路脉冲,最高计数频率为10kHz,计数范围-8388608~+8388607。21113输入延时滤波FP1的输入端采用输入延时滤波,可防止因开关机械抖动带来的不可靠性,其延时时间可根据需要进行调节,调节范围为1ms~128ms。21114中断功能FP1的中断有两种类型,一种是外部硬中断,一种是内部定时中断。212步进电机的速度控制FP1有一条SPD0指令,该指令配合HSC和Y7的脉冲输出功能可实现速度及位置控制。速度控制梯形图见图1,控制方式参数见图2,脉冲输出频率设定曲线见图3。213控制系统的程序运行图4是控制系统的原理接线图,图4中Y7输出的脉冲作为步进电机的时钟脉冲,经驱动器产生节拍脉冲,控制步进电机运转。同时Y7接至PLC的输入接点X0,并经X0送至PLC内部的HSC。HSC计数Y7的脉冲数,当达到预定值时发生中断,使Y7的脉冲频率切换至下一参数,从而实现较准确的位置控制。实现这一控制的梯形图见图5。F164SPD0S图1速度控制梯形图SS+1S+2S+3S+4S+5S+6⋯⋯S+Nf1M1f2M2⋯⋯fn设定初始脉冲频率设定目标位置对应的脉冲个数设定下一个脉冲频率设定下一个目标位置对应的脉冲个数设...