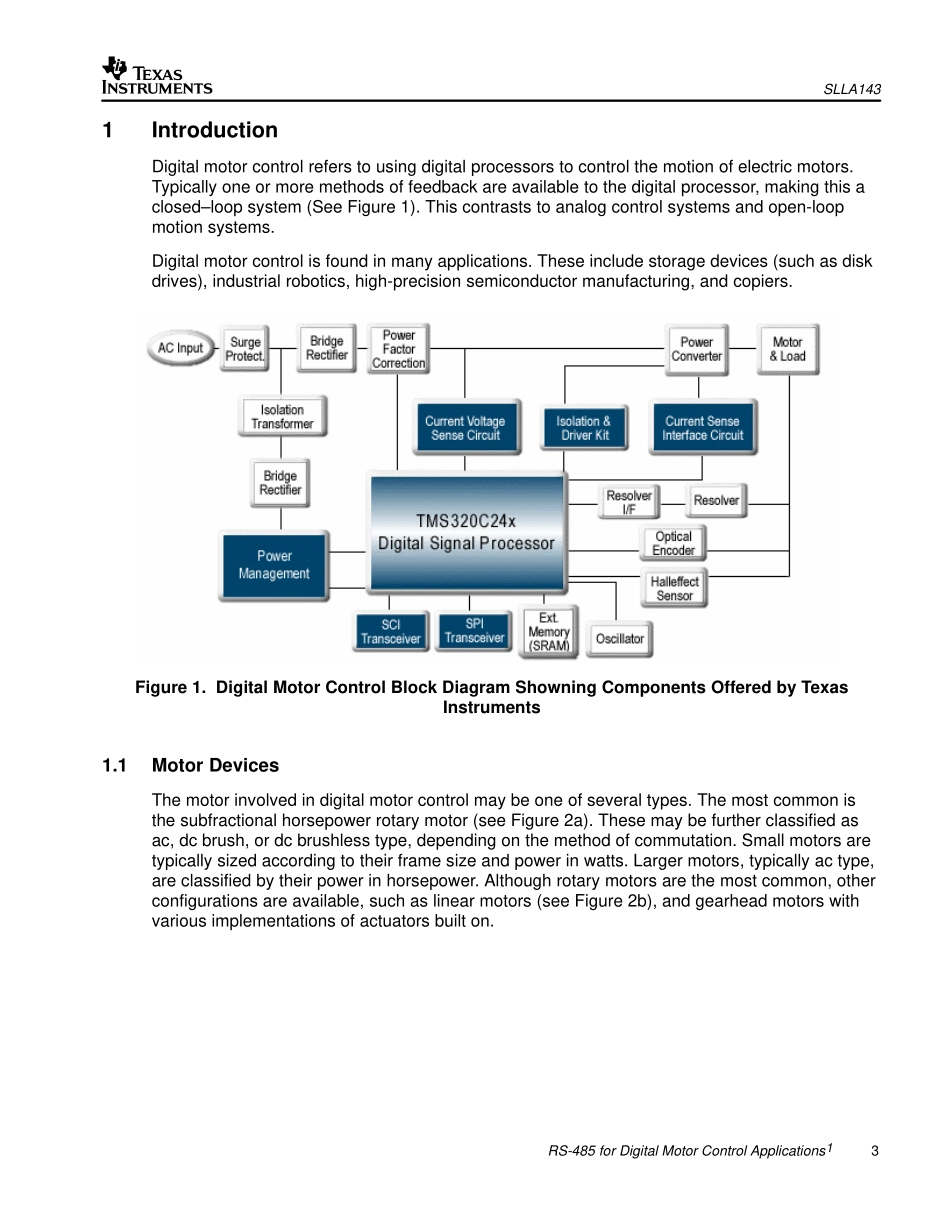
ApplicationReportSLLA143-May20031RS-485forDigitalMotorControlApplications1ClarkKinnairdHPL–InterfaceABSTRACTThisapplicationreportfocusesonthebenefitsofusingRS-485signalingformotorcontrolandmotioncontrolapplications.Thistechnologyhasseveralbenefitsfortheseapplicationsintermsofnoiseimmunity,widecommon-modevoltagerange,adequatedatarate,andmultipointcapability.OtherapplicationsalsouseRS-485signalingtotakeadvantageofthesesamebenefits.Applicationssuchasprocesscontrolnetworks,industrialautomation,remoteterminals,buildingautomationandsecuritysystemsapplyRS-485extensivelytosolvetheirrequirementsforrobustdatatransmissionoverrelativelylongdistances.Contents1Introduction3.........................................................................1.1MotorDevices3...................................................................1.2Feedback4........................................................................1.3Controllers4.......................................................................1.4DataTransmission5................................................................1.5BasicTopology5...................................................................2DataTransmissionConcernsandHowRS-485AddressesEach6.........................2.1Environment7.....................................................................2.1.1EMI/NoiseImmunity7........................................................2.1.2GroundPotentials/CommonMode8...........................................2.1.3ElectrostaticDischarge9.....................................................2.1.4GeneralRuggedness10......................................................2.2Speed10..........................................................................2.2.1FeedbackLoopDelay10.....................................................2.2.2PropagationDelay(CableTransmissionDelay,TransceiverDelay...)10.............2.2.3SignalingRate11............................................................2.2.4LargerPayloadforSerialCommunicatio...