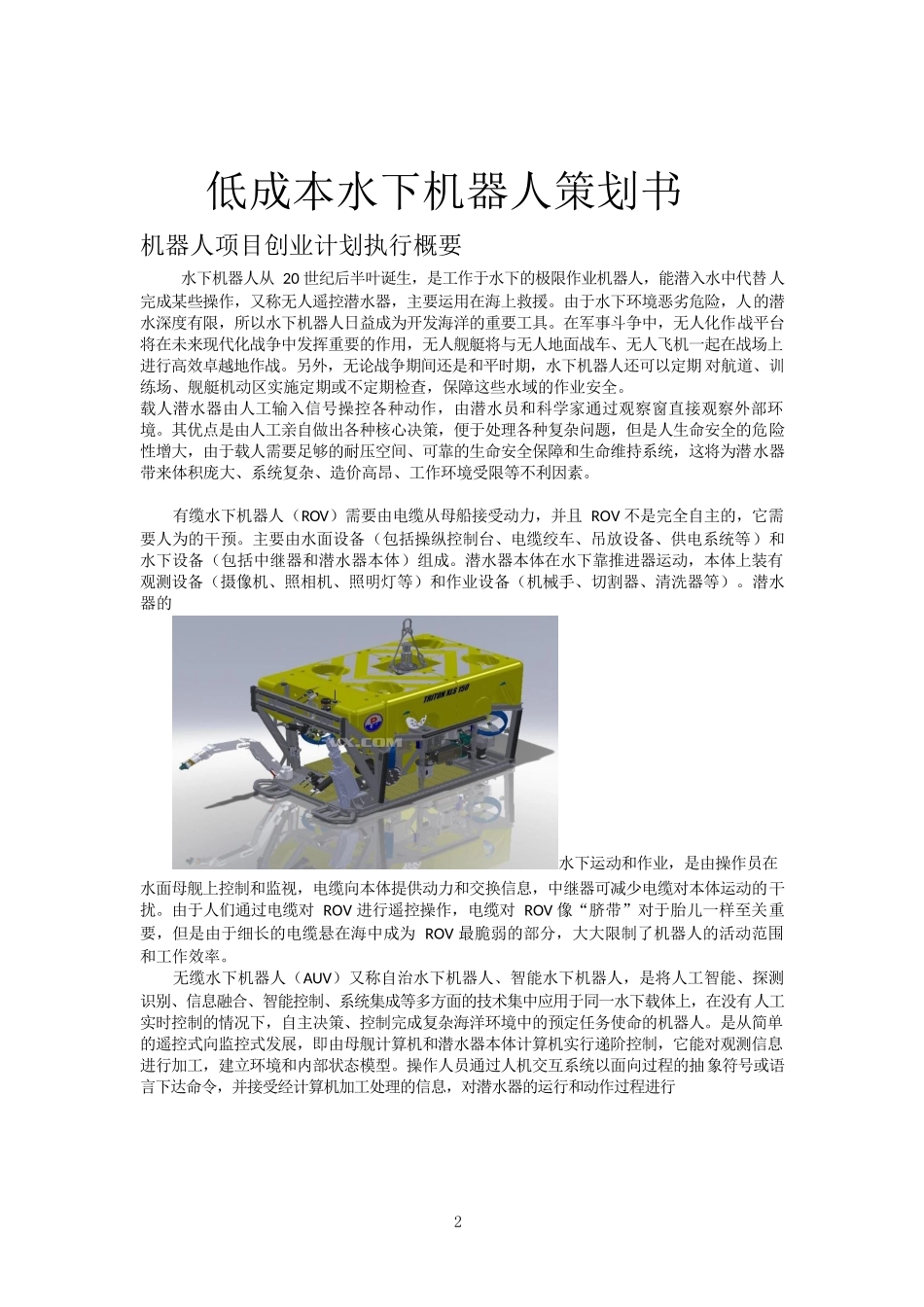
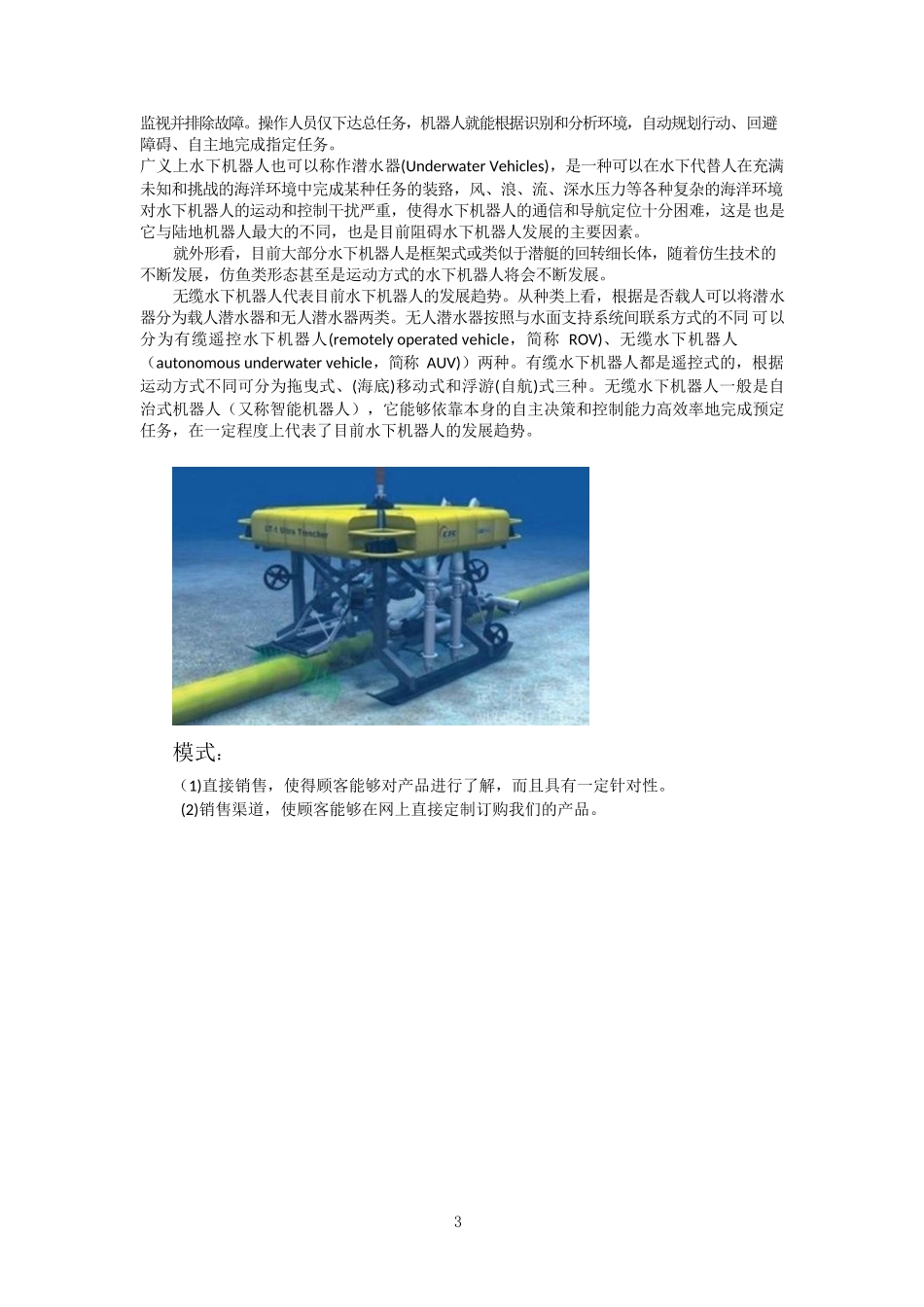
1低成本水下机器人策划书申报项目:低成本水下机器人申报人:孟永志项目负责人:孟永志申报日期:年4月17日2低成本水下机器人策划书机器人项目创业计划执行概要水下机器人从20世纪后半叶诞生,是工作于水下的极限作业机器人,能潜入水中代替人完成某些操作,又称无人遥控潜水器,主要运用在海上救援。由于水下环境恶劣危险,人的潜水深度有限,所以水下机器人日益成为开发海洋的重要工具。在军事斗争中,无人化作战平台将在未来现代化战争中发挥重要的作用,无人舰艇将与无人地面战车、无人飞机一起在战场上进行高效卓越地作战。另外,无论战争期间还是和平时期,水下机器人还可以定期对航道、训练场、舰艇机动区实施定期或不定期检查,保障这些水域的作业安全。载人潜水器由人工输入信号操控各种动作,由潜水员和科学家通过观察窗直接观察外部环境。其优点是由人工亲自做出各种核心决策,便于处理各种复杂问题,但是人生命安全的危险性增大,由于载人需要足够的耐压空间、可靠的生命安全保障和生命维持系统,这将为潜水器带来体积庞大、系统复杂、造价高昂、工作环境受限等不利因素。有缆水下机器人(ROV)需要由电缆从母船接受动力,并且ROV不是完全自主的,它需要人为的干预。主要由水面设备(包括操纵控制台、电缆绞车、吊放设备、供电系统等)和水下设备(包括中继器和潜水器本体)组成。潜水器本体在水下靠推进器运动,本体上装有观测设备(摄像机、照相机、照明灯等)和作业设备(机械手、切割器、清洗器等)。潜水器的水下运动和作业,是由操作员在水面母舰上控制和监视,电缆向本体提供动力和交换信息,中继器可减少电缆对本体运动的干扰。由于人们通过电缆对ROV进行遥控操作,电缆对ROV像“脐带”对于胎儿一样至关重要,但是由于细长的电缆悬在海中成为ROV最脆弱的部分,大大限制了机器人的活动范围和工作效率。无缆水下机器人(AUV)又称自治水下机器人、智能水下机器人,是将人工智能、探测识别、信息融合、智能控制、系统集成等多方面的技术集中应用于同一水下载体上,在没有人工实时控制的情况下,自主决策、控制完成复杂海洋环境中的预定任务使命的机器人。是从简单的遥控式向监控式发展,即由母舰计算机和潜水器本体计算机实行递阶控制,它能对观测信息进行加工,建立环境和内部状态模型。操作人员通过人机交互系统以面向过程的抽象符号或语言下达命令,并接受经计算机加工处理的信息,对潜水器的运行和动作过程进行3监视并排除故...