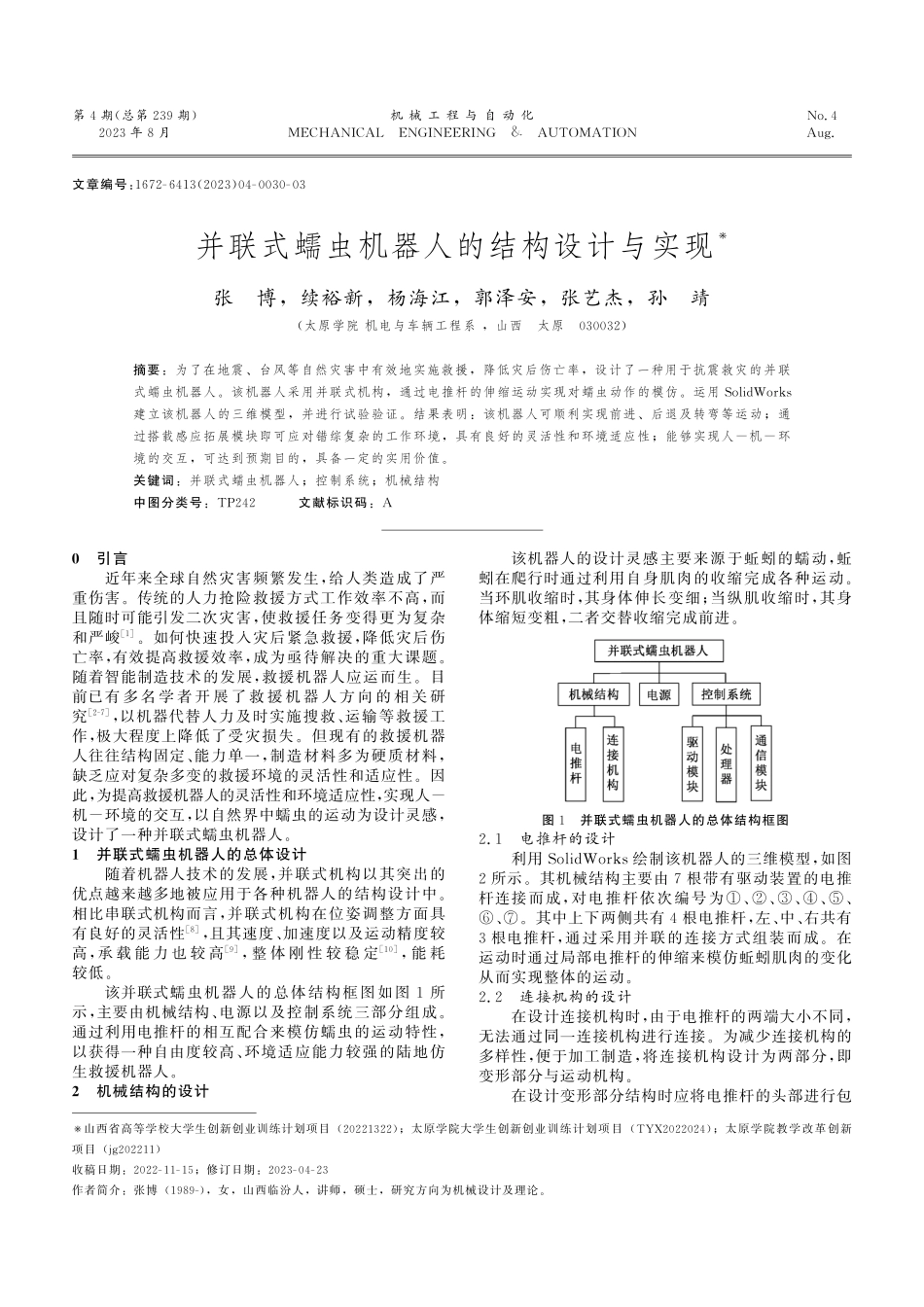
第4期(总第239期)2023年8月机械工程与自动化MECHANICALENGINEERING&AUTOMATIONNo.4Aug.文章编号:1672G6413(2023)04G0030G03并联式蠕虫机器人的结构设计与实现张博,续裕新,杨海江,郭泽安,张艺杰,孙靖(太原学院机电与车辆工程系,山西太原030032)摘要:为了在地震、台风等自然灾害中有效地实施救援,降低灾后伤亡率,设计了一种用于抗震救灾的并联式蠕虫机器人.该机器人采用并联式机构,通过电推杆的伸缩运动实现对蠕虫动作的模仿.运用SolidWorks建立该机器人的三维模型,并进行试验验证.结果表明:该机器人可顺利实现前进、后退及转弯等运动;通过搭载感应拓展模块即可应对错综复杂的工作环境,具有良好的灵活性和环境适应性;能够实现人-机-环境的交互,可达到预期目的,具备一定的实用价值.关键词:并联式蠕虫机器人;控制系统;机械结构中图分类号:TP242文献标识码:A山西省高等学校大学生创新创业训练计划项目(20221322);太原学院大学生创新创业训练计划项目(TYX2022024);太原学院教学改革创新项目(jg202211)收稿日期:2022G11G15;修订日期:2023G04G23作者简介:张博(1989G),女,山西临汾人,讲师,硕士,研究方向为机械设计及理论.0引言近年来全球自然灾害频繁发生,给人类造成了严重伤害.传统的人力抢险救援方式工作效率不高,而且随时可能引发二次灾害,使救援任务变得更为复杂和严峻[1].如何快速投入灾后紧急救援,降低灾后伤亡率,有效提高救援效率,成为亟待解决的重大课题.随着智能制造技术的发展,救援机器人应运而生.目前已有多名学者开展了救援机器人方向的相关研究[2G7],以机器代替人力及时实施搜救、运输等救援工作,极大程度上降低了受灾损失.但现有的救援机器人往往结构固定、能力单一,制造材料多为硬质材料,缺乏应对复杂多变的救援环境的灵活性和适应性.因此,为提高救援机器人的灵活性和环境适应性,实现人-机-环境的交互,以自然界中蠕虫的运动为设计灵感,设计了一种并联式蠕虫机器人.1并联式蠕虫机器人的总体设计随着机器人技术的发展,并联式机构以其突出的优点越来越多地被应用于各种机器人的结构设计中.相比串联式机构而言,并联式机构在位姿调整方面具有良好的灵活性[8],且其速度、加速度以及运动精度较高,承载能力也较高[9],整体刚性较稳定[10],能耗较低.该并联式蠕虫机器人的总体结构框图如图1所示,主要由机械结构、电源以及控制系统三部分...