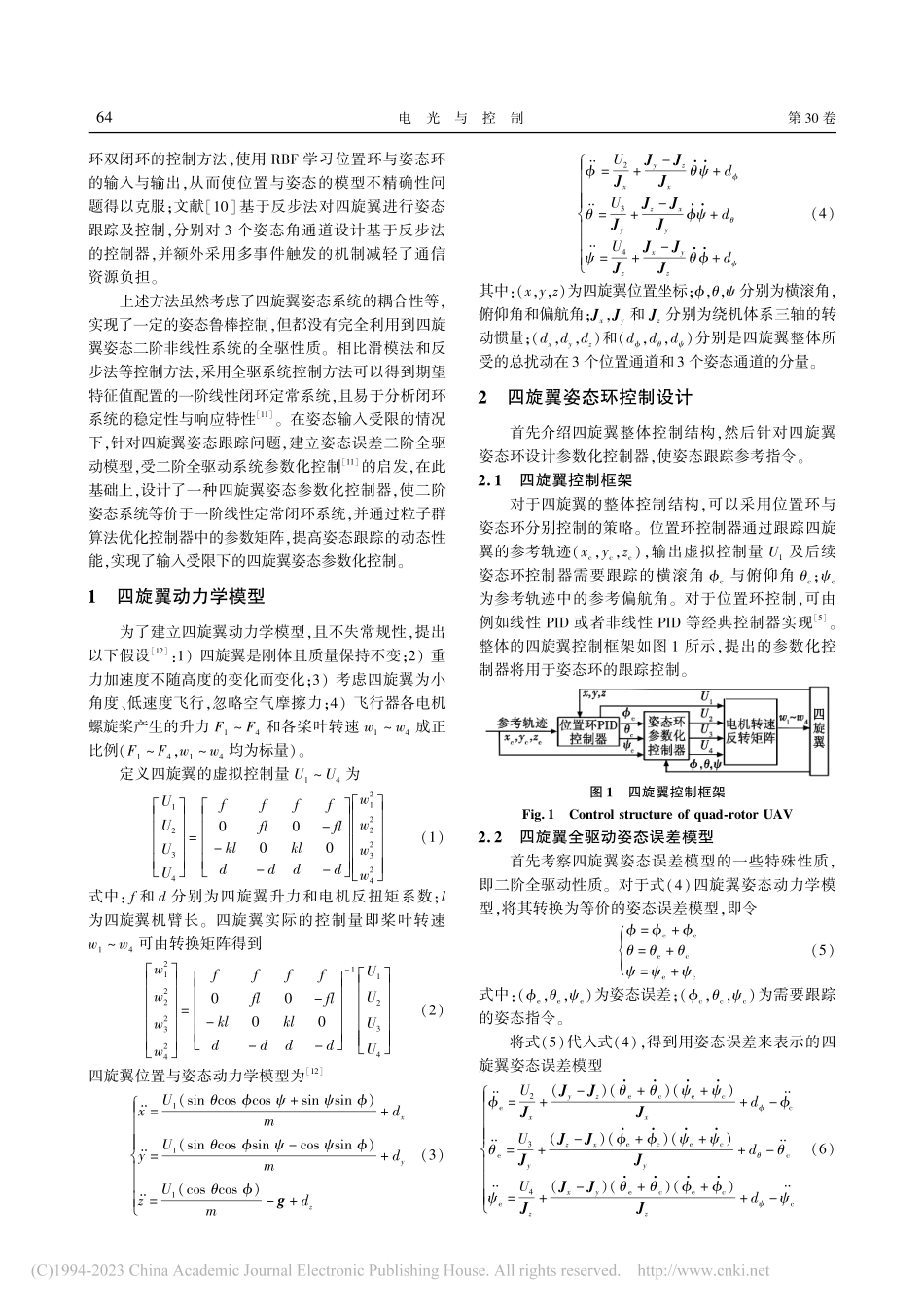
引用格式:刘高旗.输入受限下的四旋翼飞行器姿态参数化控制[J].电光与控制,2023,30(1):63⁃68.LIUGQ.Parametricattitudecontrolofquad⁃rotorUAVswithinputconstraints[J].ElectronicsOptics&Control,2023,30(1):63⁃68.输入受限下的四旋翼飞行器姿态参数化控制刘高旗(四川大学空天科学与工程学院,成都610000)摘要:针对四旋翼无人机在输入受限情况下的姿态跟踪控制问题,提出了一种参数化控制方法。首先建立了四旋翼姿态误差二阶全驱模型,采用一种参数化控制器,使姿态误差系统等价于一阶定常闭环系统,从而实现姿态角收敛至跟踪信号。考虑四旋翼输入受限及更好的跟踪性能,采用智能优化的方法,利用粒子群算法优化控制律中的参数矩阵。仿真实验表明:与反步法相比,提出的参数化控制器能够在输入受限情况下更快速地跟踪姿态指令,具有更好的暂态性能,实现了四旋翼高精度姿态跟踪控制。关键词:四旋翼无人机;输入受限;参数化控制中图分类号:V279文献标志码:Adoi:10.3969/j.issn.1671-637X.2023.01.011ParametricAttitudeControlofQuad⁃RotorUAVswithInputConstraintsLIUGaoqi(SchoolofAerospaceScienceandEngineering,SichuanUniversity,Chengdu610000,China)Abstract:Aimingattheattitudetrackingcontrolproblemofquad⁃rotorUAVunderinputconstraints,aparametriccontrolmethodisproposed.Firstly,asecond⁃order,full⁃actuatedmodelofquad⁃rotorattitudeerrorisestablished,andaparametriccontrollerisadoptedtomaketheattitudeerrorsystemequivalenttoafirst⁃ordersteadyclosed⁃loopsystem,whichmaketheattitudeerrorsconv...