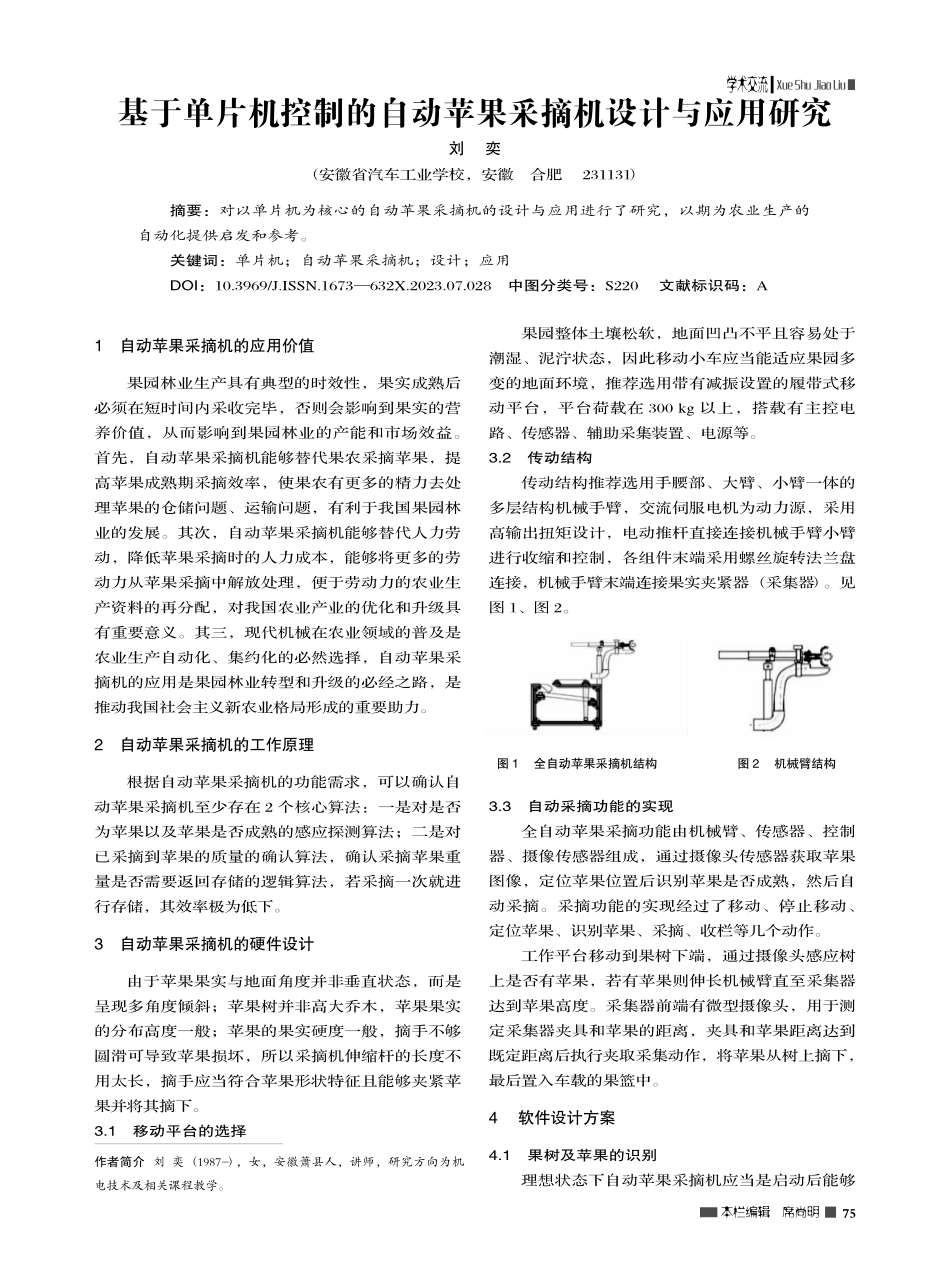
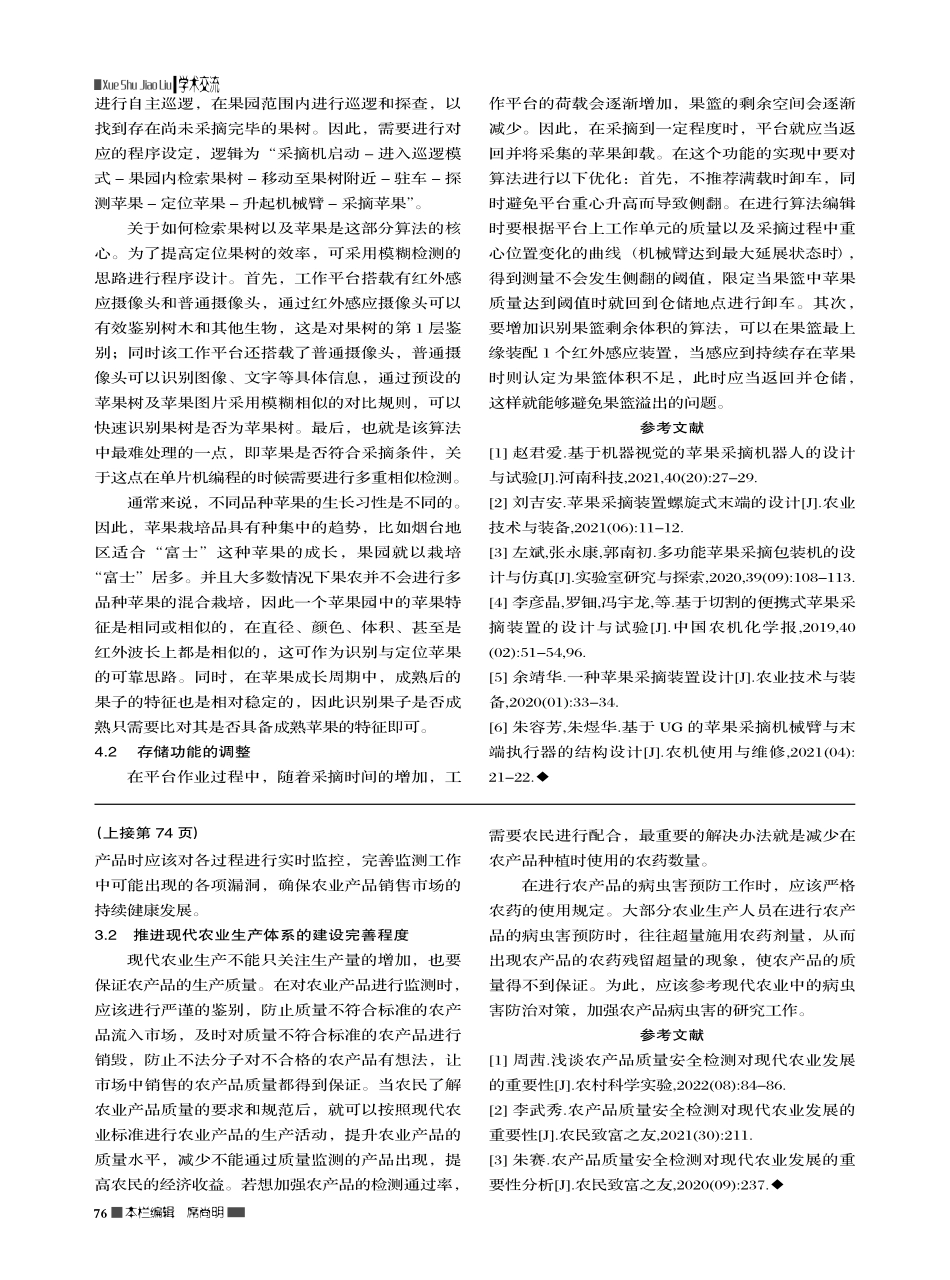
学术交流本栏编辑席尚明XueShuJiaoLiu1自动苹果采摘机的应用价值果园林业生产具有典型的时效性,果实成熟后必须在短时间内采收完毕,否则会影响到果实的营养价值,从而影响到果园林业的产能和市场效益。首先,自动苹果采摘机能够替代果农采摘苹果,提高苹果成熟期采摘效率,使果农有更多的精力去处理苹果的仓储问题、运输问题,有利于我国果园林业的发展。其次,自动苹果采摘机能够替代人力劳动,降低苹果采摘时的人力成本,能够将更多的劳动力从苹果采摘中解放处理,便于劳动力的农业生产资料的再分配,对我国农业产业的优化和升级具有重要意义。其三,现代机械在农业领域的普及是农业生产自动化、集约化的必然选择,自动苹果采摘机的应用是果园林业转型和升级的必经之路,是推动我国社会主义新农业格局形成的重要助力。2自动苹果采摘机的工作原理根据自动苹果采摘机的功能需求,可以确认自动苹果采摘机至少存在2个核心算法:一是对是否为苹果以及苹果是否成熟的感应探测算法;二是对已采摘到苹果的质量的确认算法,确认采摘苹果重量是否需要返回存储的逻辑算法,若采摘一次就进行存储,其效率极为低下。3自动苹果采摘机的硬件设计由于苹果果实与地面角度并非垂直状态,而是呈现多角度倾斜;苹果树并非高大乔木,苹果果实的分布高度一般;苹果的果实硬度一般,摘手不够圆滑可导致苹果损坏,所以采摘机伸缩杆的长度不用太长,摘手应当符合苹果形状特征且能够夹紧苹果并将其摘下。3.1移动平台的选择果园整体土壤松软,地面凹凸不平且容易处于潮湿、泥泞状态,因此移动小车应当能适应果园多变的地面环境,推荐选用带有减振设置的履带式移动平台,平台荷载在300kg以上,搭载有主控电路、传感器、辅助采集装置、电源等。3.2传动结构传动结构推荐选用手腰部、大臂、小臂一体的多层结构机械手臂,交流伺服电机为动力源,采用高输出扭矩设计,电动推杆直接连接机械手臂小臂进行收缩和控制,各组件末端采用螺丝旋转法兰盘连接,机械手臂末端连接果实夹紧器(采集器)。见图1、图2。3.3自动采摘功能的实现全自动苹果采摘功能由机械臂、传感器、控制器、摄像传感器组成,通过摄像头传感器获取苹果图像,定位苹果位置后识别苹果是否成熟,然后自动采摘。采摘功能的实现经过了移动、停止移动、定位苹果、识别苹果、采摘、收栏等几个动作。工作平台移动到果树下端,通过摄像头感应树上是否有苹果,若有苹果则伸长机械臂直至采集器达到苹果高度。采集器前端有微型...