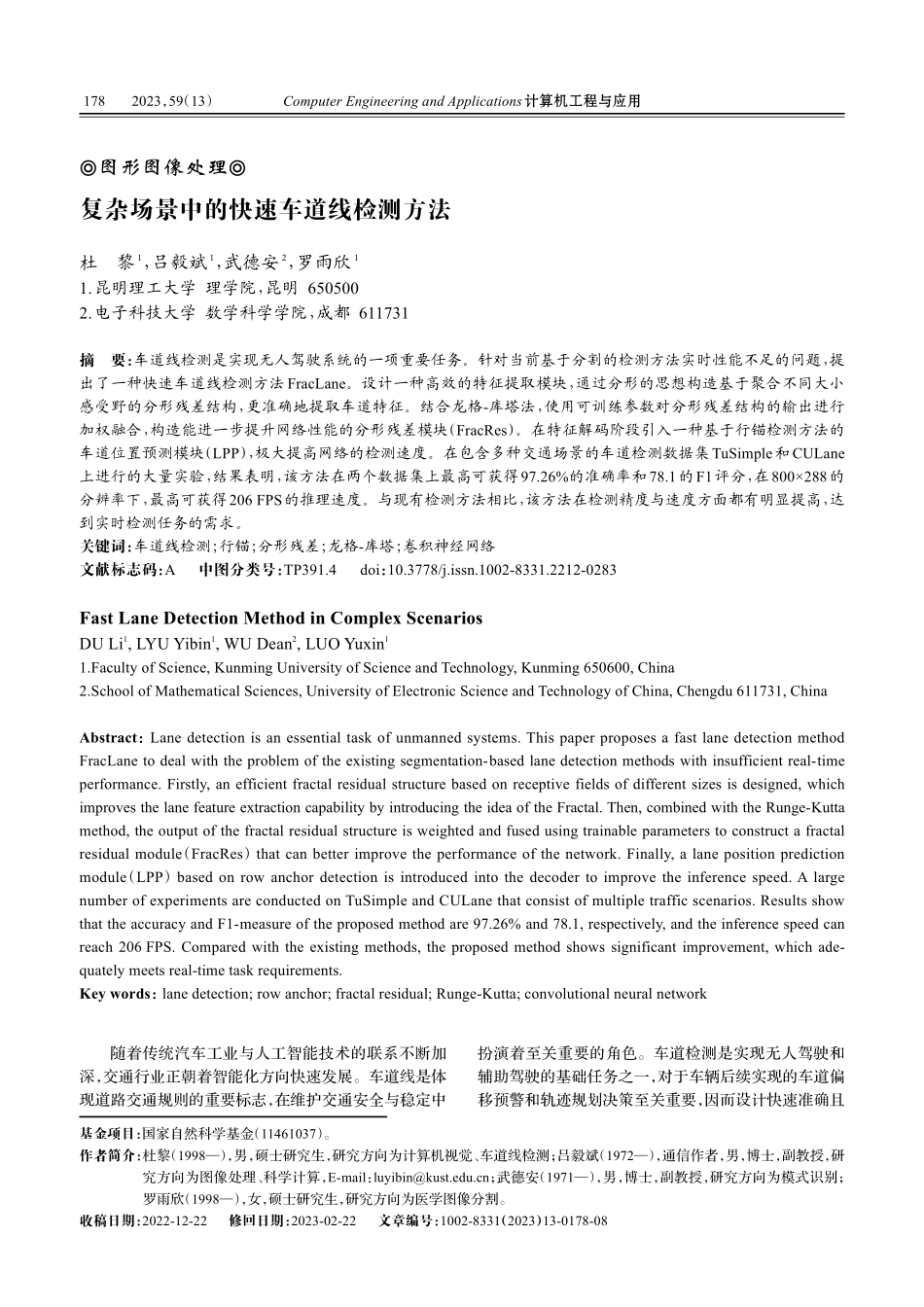
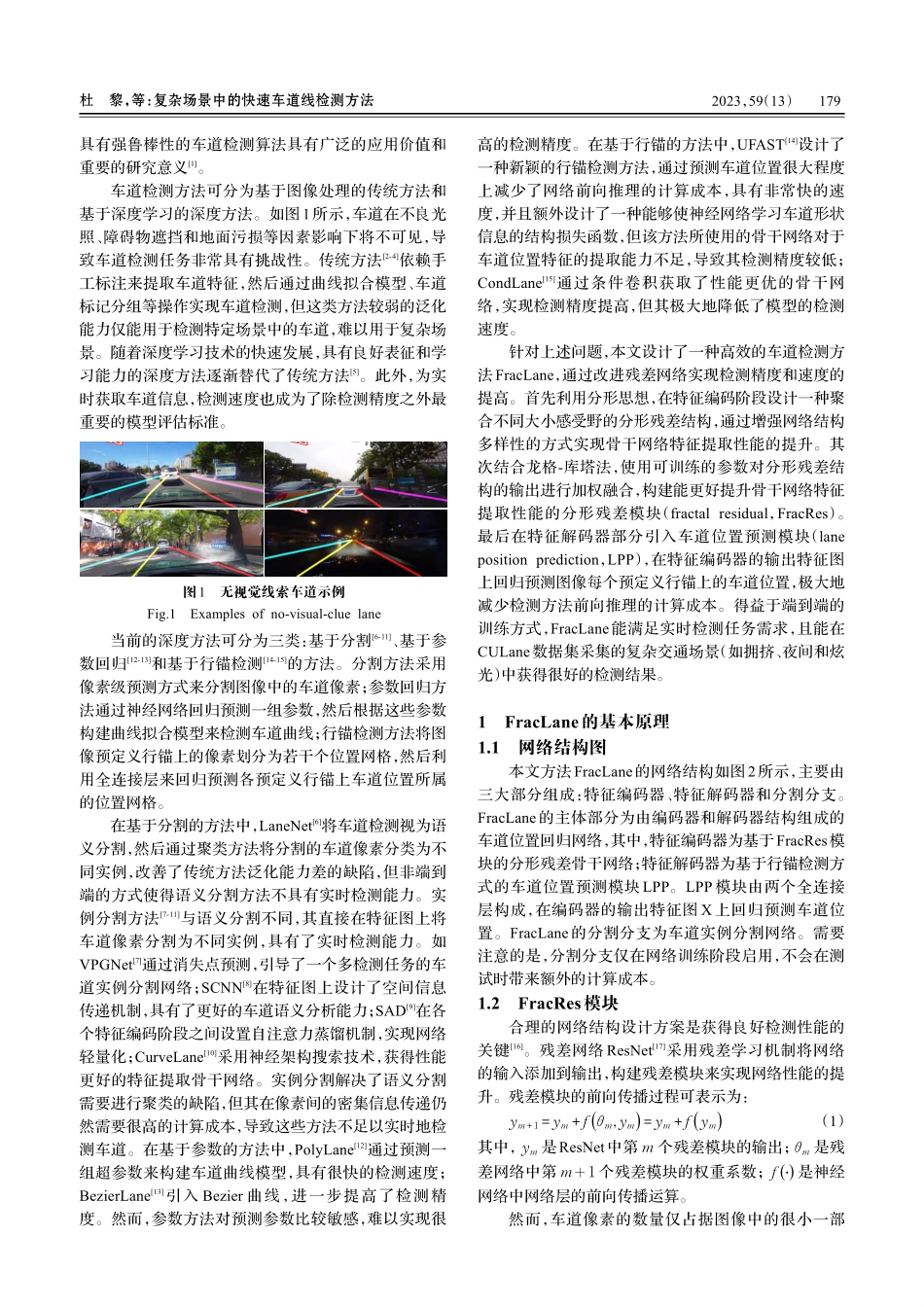
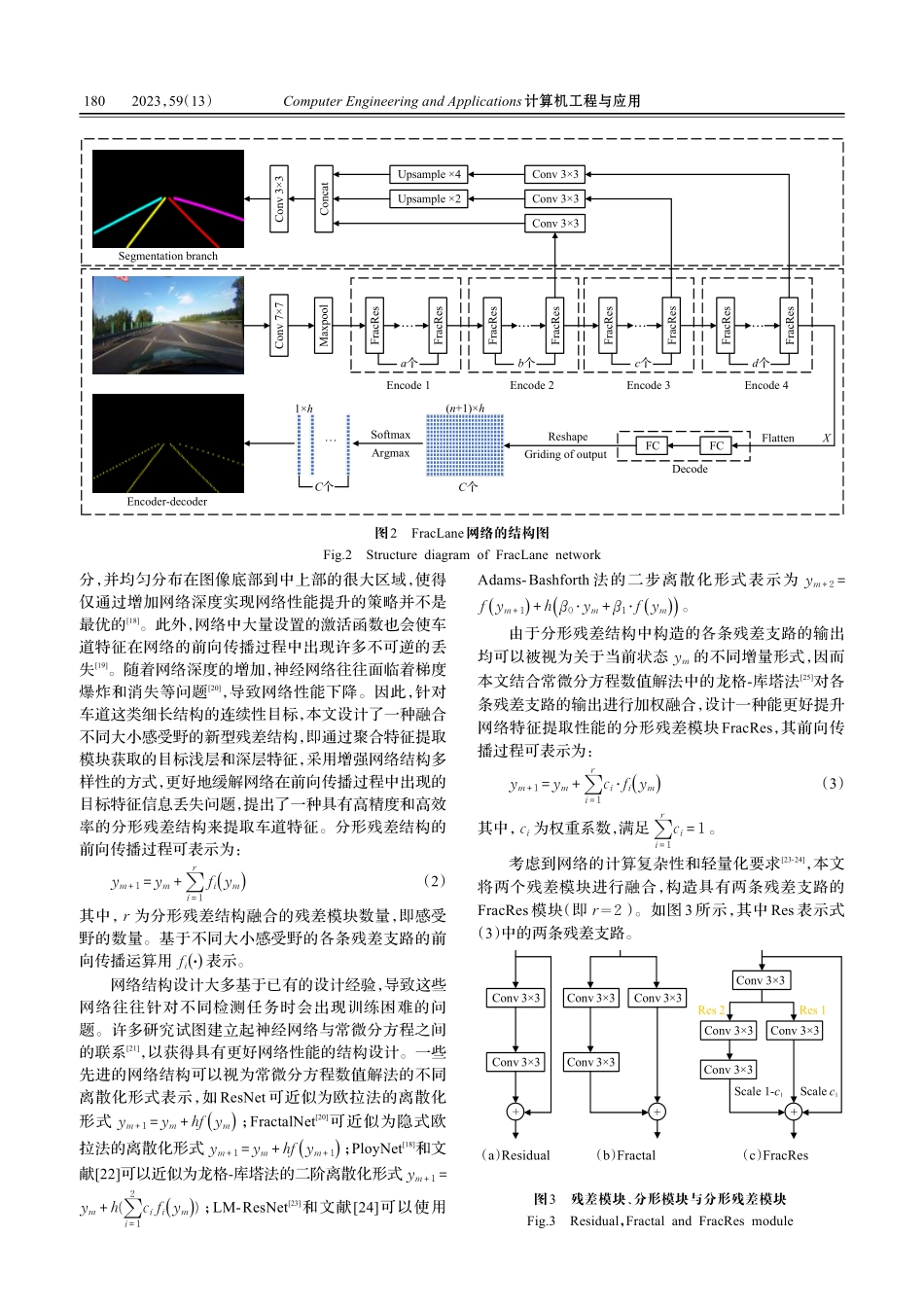
ComputerEngineeringandApplications计算机工程与应用2023,59(13)随着传统汽车工业与人工智能技术的联系不断加深,交通行业正朝着智能化方向快速发展。车道线是体现道路交通规则的重要标志,在维护交通安全与稳定中扮演着至关重要的角色。车道检测是实现无人驾驶和辅助驾驶的基础任务之一,对于车辆后续实现的车道偏移预警和轨迹规划决策至关重要,因而设计快速准确且⦾图形图像处理⦾复杂场景中的快速车道线检测方法杜黎1,吕毅斌1,武德安2,罗雨欣11.昆明理工大学理学院,昆明6505002.电子科技大学数学科学学院,成都611731摘要:车道线检测是实现无人驾驶系统的一项重要任务。针对当前基于分割的检测方法实时性能不足的问题,提出了一种快速车道线检测方法FracLane。设计一种高效的特征提取模块,通过分形的思想构造基于聚合不同大小感受野的分形残差结构,更准确地提取车道特征。结合龙格-库塔法,使用可训练参数对分形残差结构的输出进行加权融合,构造能进一步提升网络性能的分形残差模块(FracRes)。在特征解码阶段引入一种基于行锚检测方法的车道位置预测模块(LPP),极大提高网络的检测速度。在包含多种交通场景的车道检测数据集TuSimple和CULane上进行的大量实验,结果表明,该方法在两个数据集上最高可获得97.26%的准确率和78.1的F1评分,在800×288的分辨率下,最高可获得206FPS的推理速度。与现有检测方法相比,该方法在检测精度与速度方面都有明显提高,达到实时检测任务的需求。关键词:车道线检测;行锚;分形残差;龙格-库塔;卷积神经网络文献标志码:A中图分类号:TP391.4doi:10.3778/j.issn.1002-8331.2212-0283FastLaneDetectionMethodinComplexScenariosDULi1,LYUYibin1,WUDean2,LUOYuxin11.FacultyofScience,KunmingUniversityofScienceandTechnology,Kunming650600,China2.SchoolofMathematicalSciences,UniversityofElectronicScienceandTechnologyofChina,Chengdu611731,ChinaAbstract:Lanedetectionisanessentialtaskofunmannedsystems.ThispaperproposesafastlanedetectionmethodFracLanetodealwiththeproblemoftheexistingsegmentation-basedlanedetectionmethodswithinsufficientreal-timeperformance.Firstly,anefficientfractalresidualstructurebasedonreceptivefieldsofdifferentsizesisdesigned,whichimprovesthelanefeatureextractioncapabilitybyintroducingtheideaoftheFractal.Then,combinedwithth...