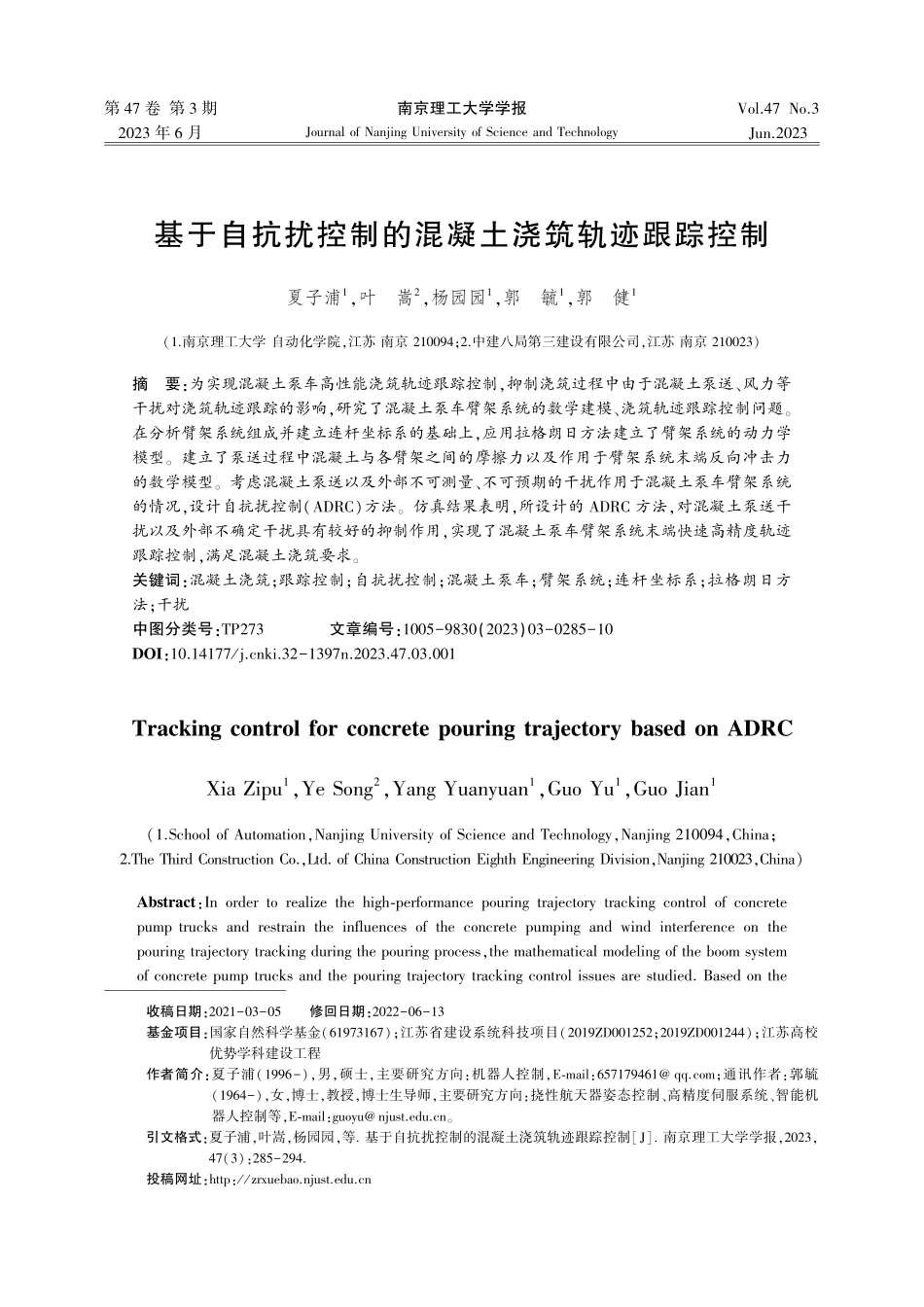
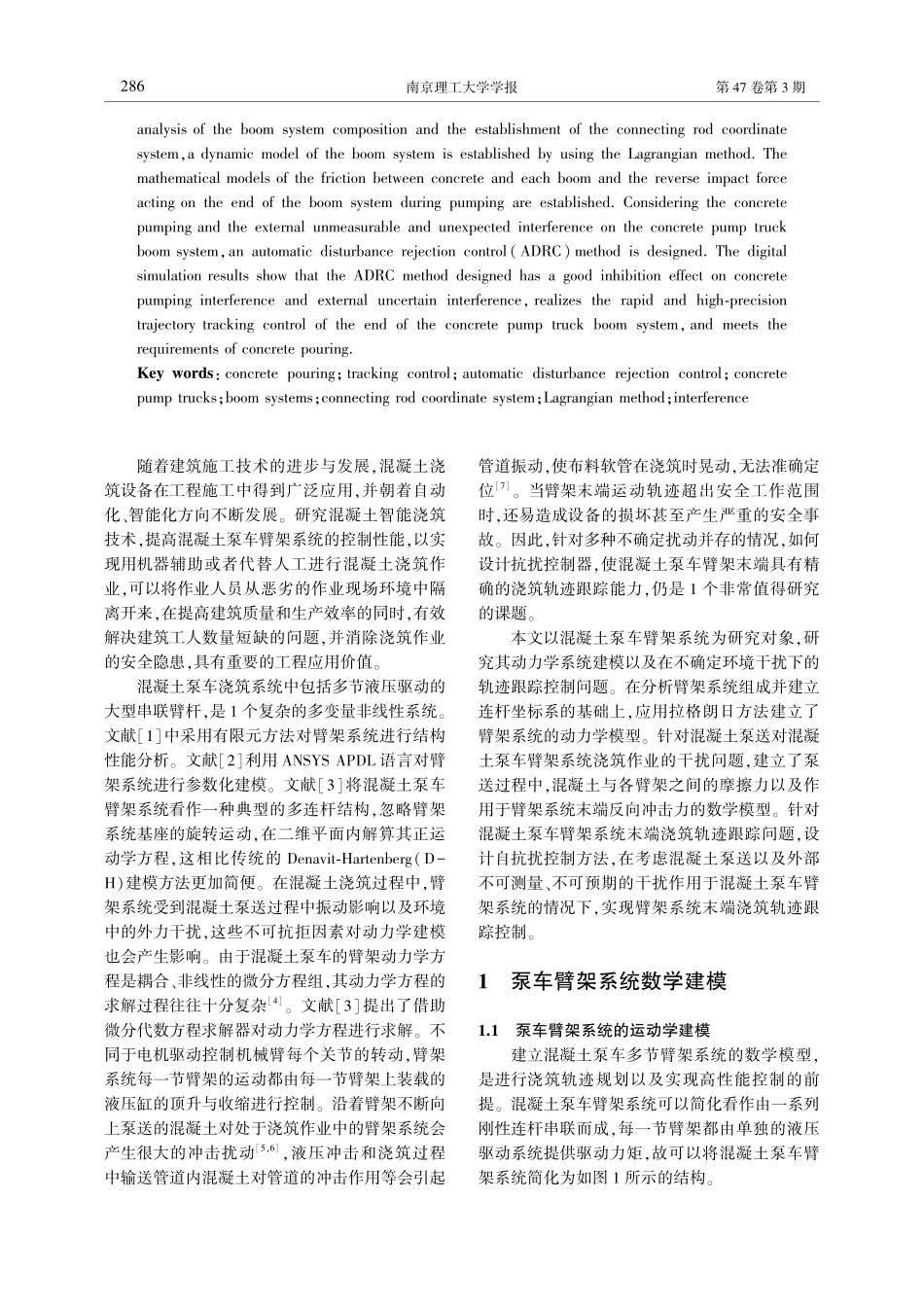
第47卷第3期2023年6月南京理工大学学报JournalofNanjingUniversityofScienceandTechnologyVol.47No.3Jun.2023收稿日期:2021-03-05修回日期:2022-06-13基金项目:国家自然科学基金(61973167);江苏省建设系统科技项目(2019ZD001252;2019ZD001244);江苏高校优势学科建设工程作者简介:夏子浦(1996-),男,硕士,主要研究方向:机器人控制,E⁃mail:657179461@qq.com;通讯作者:郭毓(1964-),女,博士,教授,博士生导师,主要研究方向:挠性航天器姿态控制、高精度伺服系统、智能机器人控制等,E⁃mail:guoyu@njust.edu.cn。引文格式:夏子浦,叶嵩,杨园园,等.基于自抗扰控制的混凝土浇筑轨迹跟踪控制[J].南京理工大学学报,2023,47(3):285-294.投稿网址:http://zrxuebao.njust.edu.cn基于自抗扰控制的混凝土浇筑轨迹跟踪控制夏子浦1,叶嵩2,杨园园1,郭毓1,郭健1(1.南京理工大学自动化学院,江苏南京210094;2.中建八局第三建设有限公司,江苏南京210023)摘要:为实现混凝土泵车高性能浇筑轨迹跟踪控制,抑制浇筑过程中由于混凝土泵送、风力等干扰对浇筑轨迹跟踪的影响,研究了混凝土泵车臂架系统的数学建模、浇筑轨迹跟踪控制问题。在分析臂架系统组成并建立连杆坐标系的基础上,应用拉格朗日方法建立了臂架系统的动力学模型。建立了泵送过程中混凝土与各臂架之间的摩擦力以及作用于臂架系统末端反向冲击力的数学模型。考虑混凝土泵送以及外部不可测量、不可预期的干扰作用于混凝土泵车臂架系统的情况,设计自抗扰控制(ADRC)方法。仿真结果表明,所设计的ADRC方法,对混凝土泵送干扰以及外部不确定干扰具有较好的抑制作用,实现了混凝土泵车臂架系统末端快速高精度轨迹跟踪控制,满足混凝土浇筑要求。关键词:混凝土浇筑;跟踪控制;自抗扰控制;混凝土泵车;臂架系统;连杆坐标系;拉格朗日方法;干扰中图分类号:TP273文章编号:1005-9830(2023)03-0285-10DOI:10.14177/j.cnki.32-1397n.2023.47.03.001Trackingcontrolforconcretep...