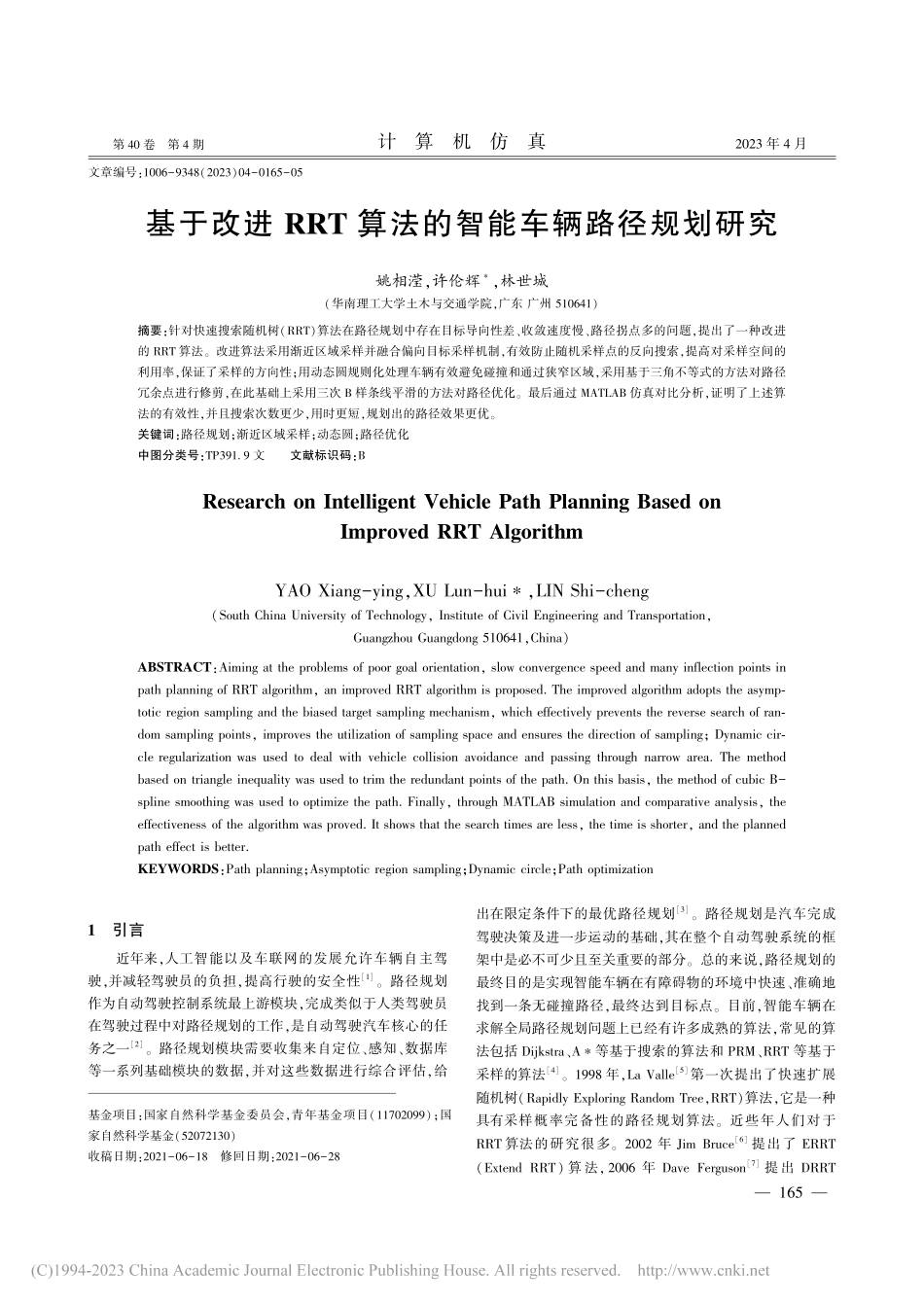
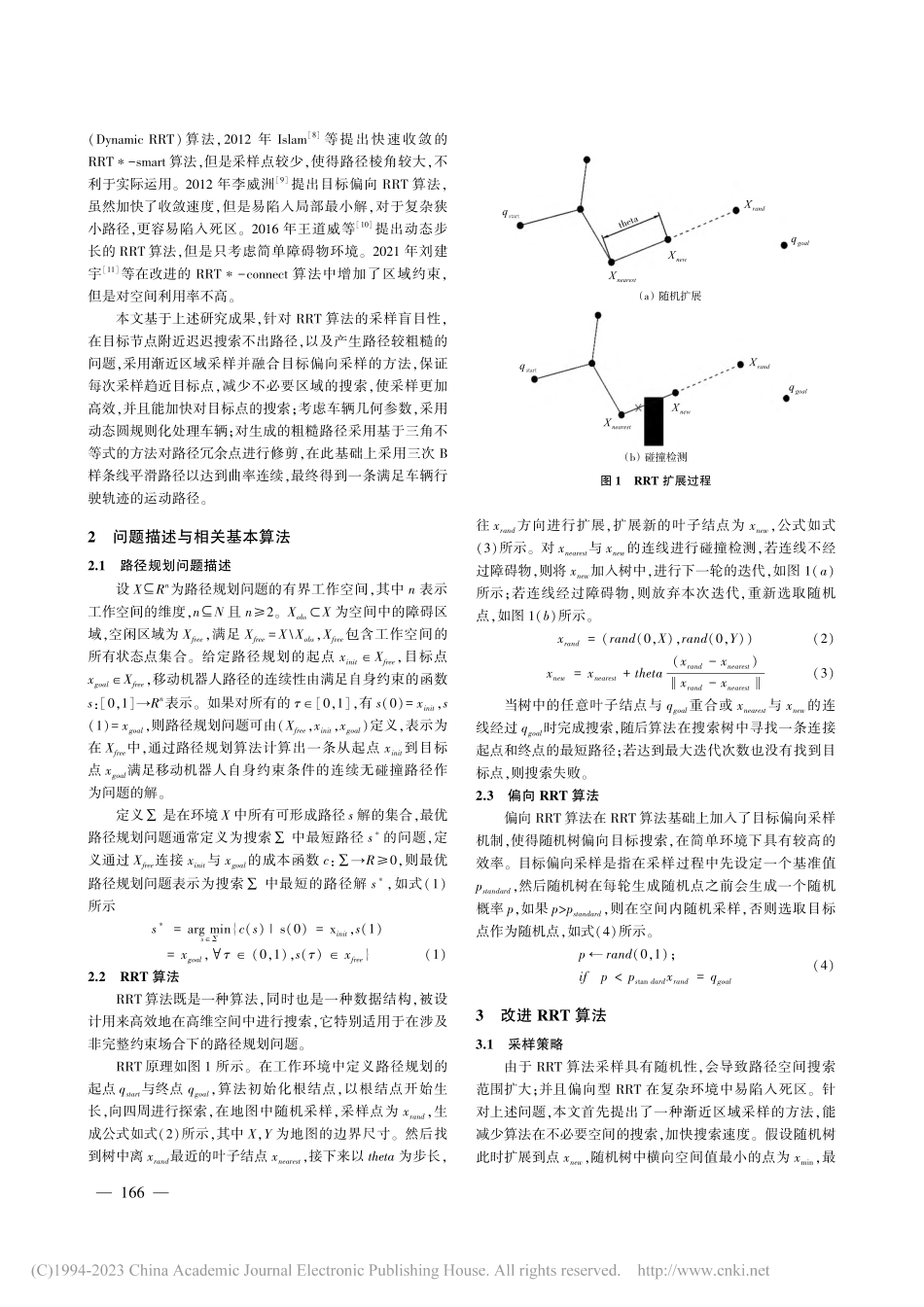
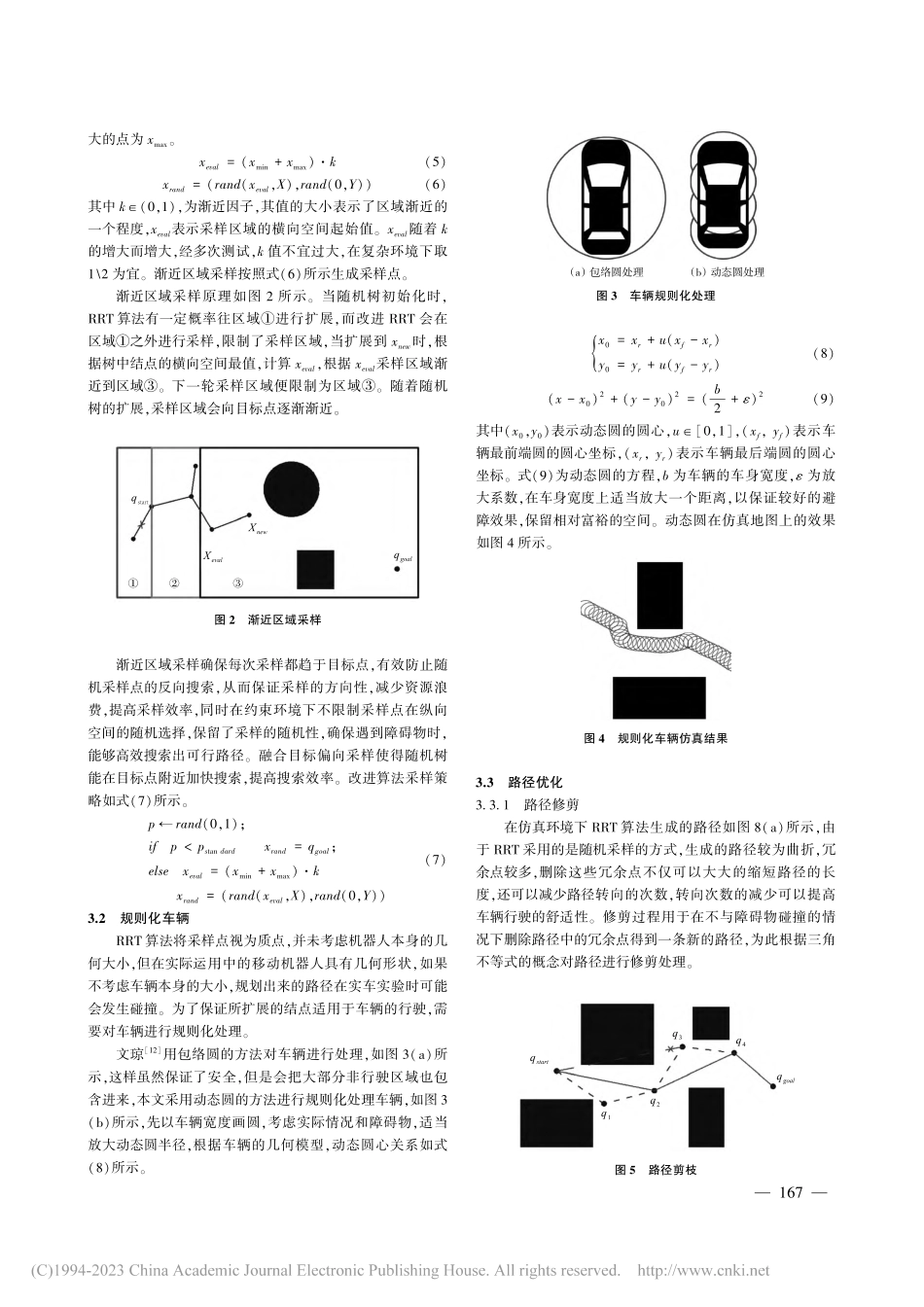
基金项目:国家自然科学基金委员会,青年基金项目(11702099);国家自然科学基金(52072130)收稿日期:2021-06-18修回日期:2021-06-28第40卷第4期计算机仿真2023年4月文章编号:1006-9348(2023)04-0165-05基于改进RRT算法的智能车辆路径规划研究姚相滢,许伦辉∗,林世城(华南理工大学土木与交通学院,广东广州510641)摘要:针对快速搜索随机树(RRT)算法在路径规划中存在目标导向性差、收敛速度慢、路径拐点多的问题,提出了一种改进的RRT算法。改进算法采用渐近区域采样并融合偏向目标采样机制,有效防止随机采样点的反向搜索,提高对采样空间的利用率,保证了采样的方向性;用动态圆规则化处理车辆有效避免碰撞和通过狭窄区域,采用基于三角不等式的方法对路径冗余点进行修剪,在此基础上采用三次B样条线平滑的方法对路径优化。最后通过MATLAB仿真对比分析,证明了上述算法的有效性,并且搜索次数更少,用时更短,规划出的路径效果更优。关键词:路径规划;渐近区域采样;动态圆;路径优化中图分类号:TP391.9文文献标识码:BResearchonIntelligentVehiclePathPlanningBasedonImprovedRRTAlgorithmYAOXiang-ying,XULun-hui∗,LINShi-cheng(SouthChinaUniversityofTechnology,InstituteofCivilEngineeringandTransportation,GuangzhouGuangdong510641,China)ABSTRACT:Aimingattheproblemsofpoorgoalorientation,slowconvergencespeedandmanyinflectionpointsinpathplanningofRRTalgorithm,animprovedRRTalgorithmisproposed.Theimprovedalgorithmadoptstheasymp-toticregionsamplingandthebiasedtargetsamplingmechanism,whicheffectivelypreventsthereversesearchofran-domsamplingpoints,improvestheutilizationofsamplingspaceandensuresthedirectionofsampling;Dynamiccir-cleregularizationwasusedtodealwithvehiclecollisionavoidanceandpassingthroughnarrowarea.Themethodbasedontriangleinequalitywasusedtotrimtheredundantpointsofthepath.Onthisbasis,themethodofcubicB-splinesmoothingwasusedtooptimizethepath.Finally,throughMATLABsimulationandcomparativeanalysis,theeffectivenessofthealgorithmwasproved.Itshowsthatthesearchtimesareless,thetimeisshorter,andtheplannedpatheffectisbetter.KEYWORDS:Pathplanning;Asymptoticregionsampling;Dynamiccircle;Pathoptimization1引言近年来,人工智能以及车联网的发展允许车辆自主驾驶,并减轻驾驶员的负担,...