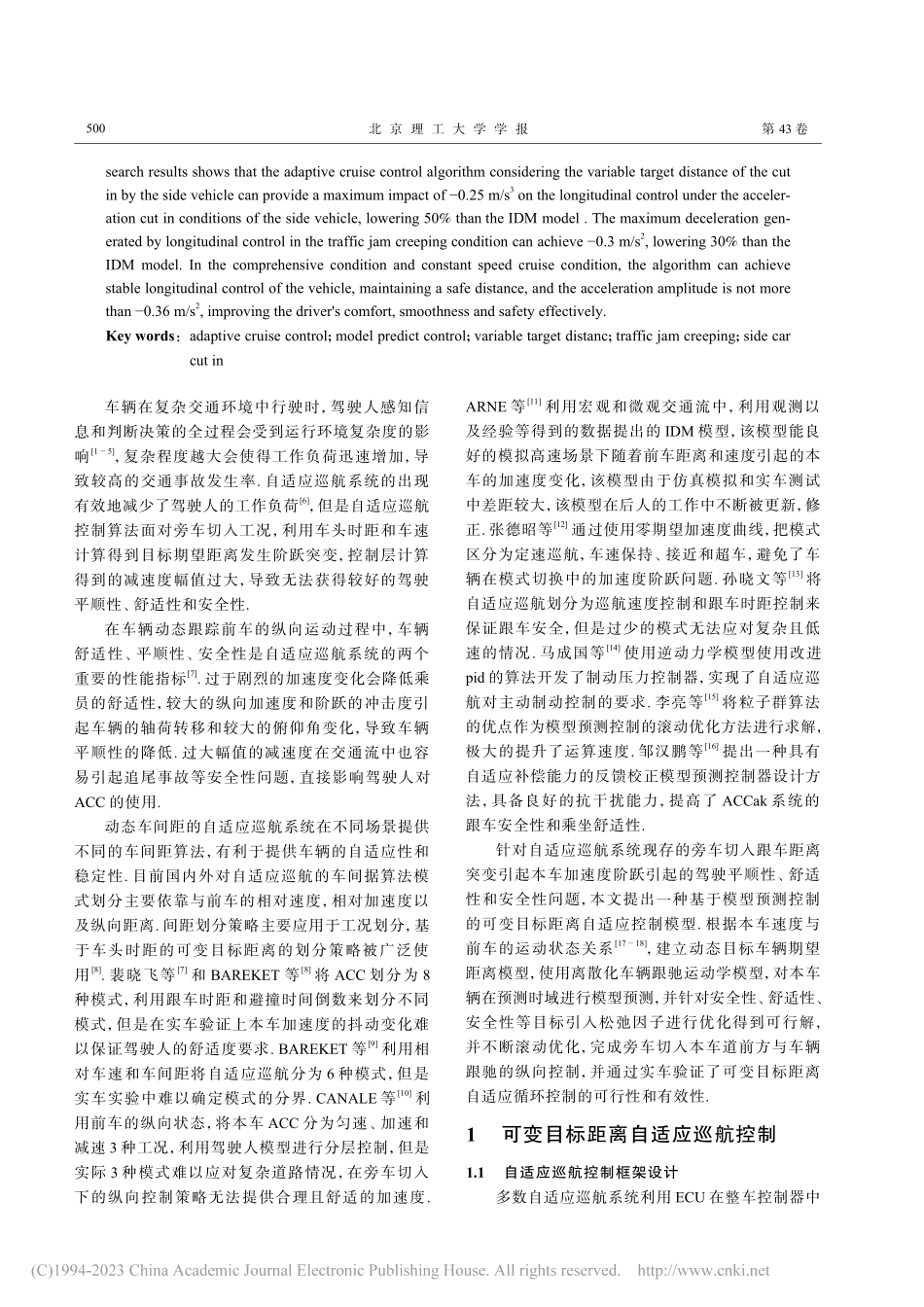
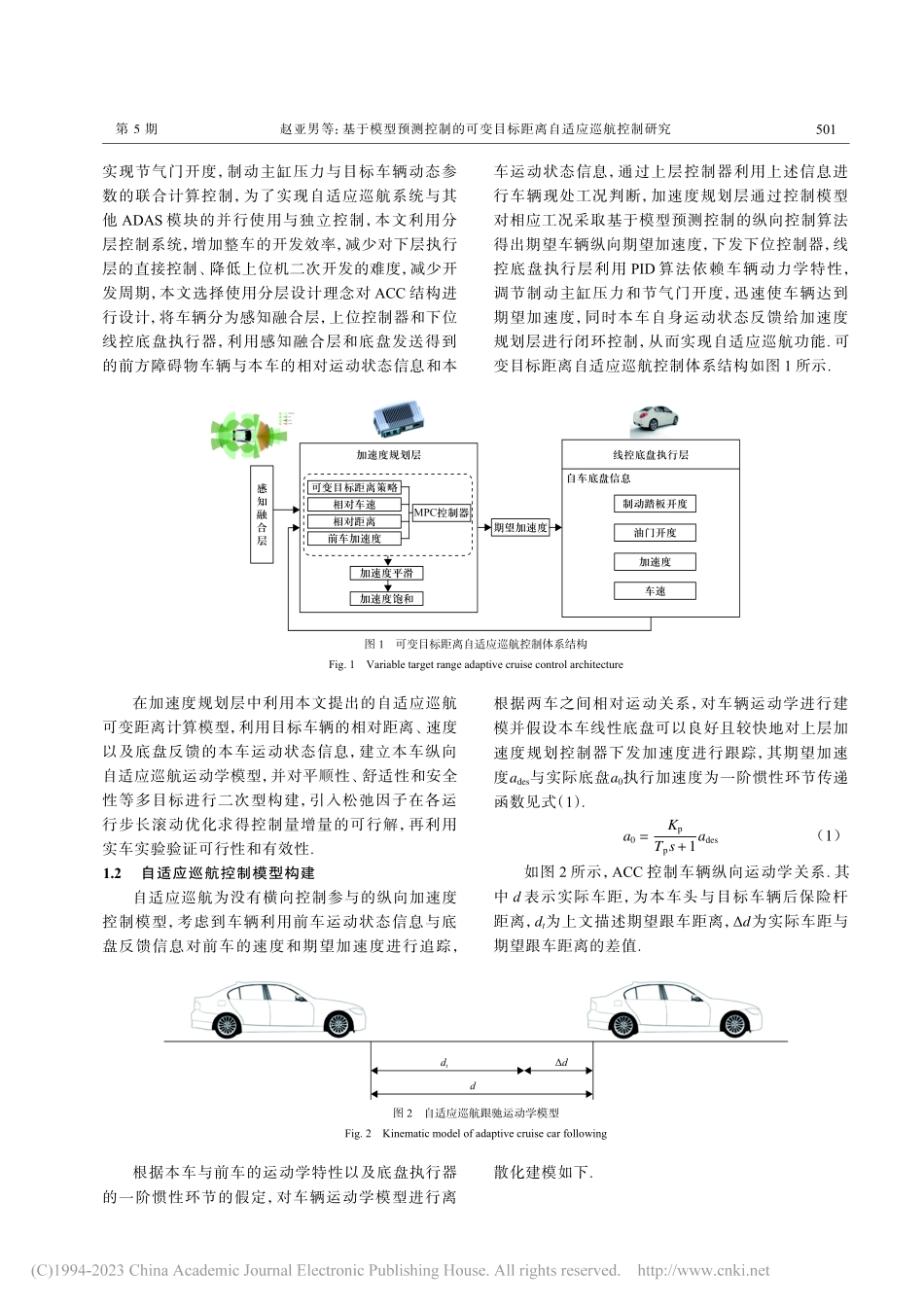
基于模型预测控制的可变目标距离自适应巡航控制研究赵亚男1,王泰翔1,高利1,孙海鑫2,王显才1(1.北京理工大学机械与车辆学院,北京100081;2.北京理工大学艺术与设计学院,北京100081)摘要:为解决在复杂交通环境中自适应巡航系统存在旁车切入本车前方工况时,目标期望距离计算模型得到的期望相对距离与实际相对距离发生阶跃以及堵车蠕行工况,车辆与前车距离较近,拥堵路况不断启停的目标车辆的速度、加速度和相对距离持续抖动,导致的纵向加速度幅值过大带来的驾驶平顺性、舒适性和安全性问题,提出可变目标距离的自适应巡航控制算法,基于模型预测控制理论,建立离散纵向运动学预测模型,综合考虑底盘加速度响应、极限安全纵向跟车距离、车辆自身物理限制、驾驶人乘坐舒适性等优化控制目标,引入松弛因子进行在线求得可行解.在旁车不同切入工况、综合工况行驶以及堵车蠕行工况对本算法进行仿真和实车测试并利用数据对IDM算法开环实验,研究成果对比表明,考虑旁车切入的可变目标距离的自适应巡航控制算法在旁车加速切入工况中,纵向控制产生的最大冲击度为−0.25m/s3,相比于IDM模型降低50%,堵车蠕行工况中纵向控制产生最大减速度为−0.3m/s2,相比于IDM模型降低30%,综合工况和定速巡航工况中,算法在保持安全距离情况下可以对车辆实现稳定纵向控制,加速度幅值不超过−0.36m/s2,可有效提高驾驶人的舒适性、平顺性和安全性.关键词:自适应巡航;模型预测控制;可变目标距离;堵车蠕行;旁车切入中图分类号:U27文献标志码:A文章编号:1001-0645(2023)05-0499-11DOI:10.15918/j.tbit1001-0645.2022.136AModelPredictControlbasedAdaptiveCruiseControlofVariableTargetDistanceZHAOYa'nan1,WANGTaixiang1,GAOLi1,SUNHaixin2,WANGXiancai1(1.SchoolofMechanicalEngineering,BeijingInstituteofTechnology,Beijing100081,China;2.SchoolofArtandDesign,BeijingInstituteofTechnology,Beijing100081,China)Abstract:Tosolvetheproblemspresentedtotheadaptivecruisesysteminthecomplextrafficenvironment,anadaptivecruisecontrolalgorithmwithvariabletargetdistancecontrolalgorithmwasproposed.Thecomplextrafficconditionsmainlyconsiderasfollowingtwoaspects.Asidecarcutintothefrontofthevehicle,causingtheexpectedrelativedistanceobtainedfromthetargetexpecteddistancecalculationmodelemergeastepchangefromtheactualre...