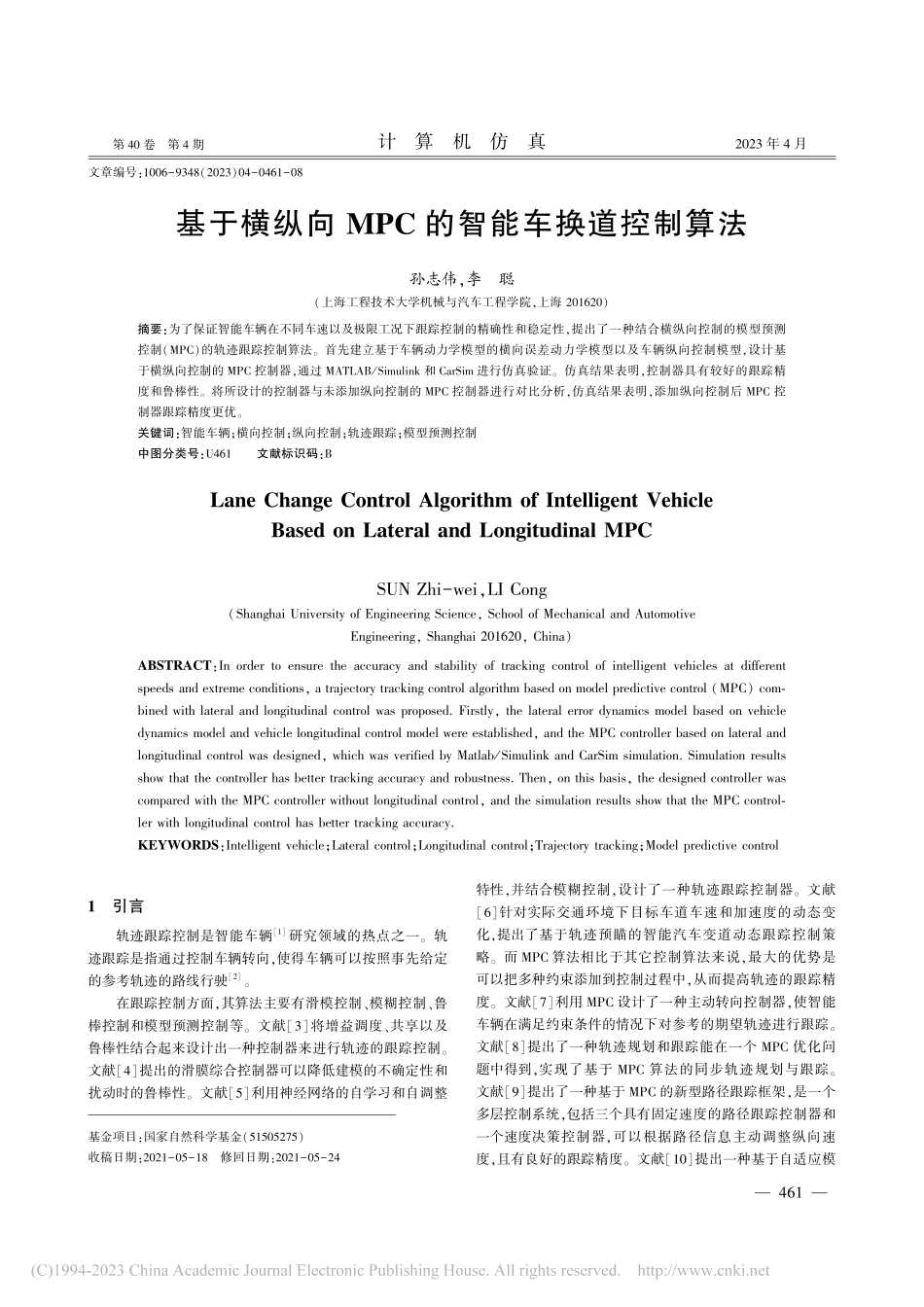
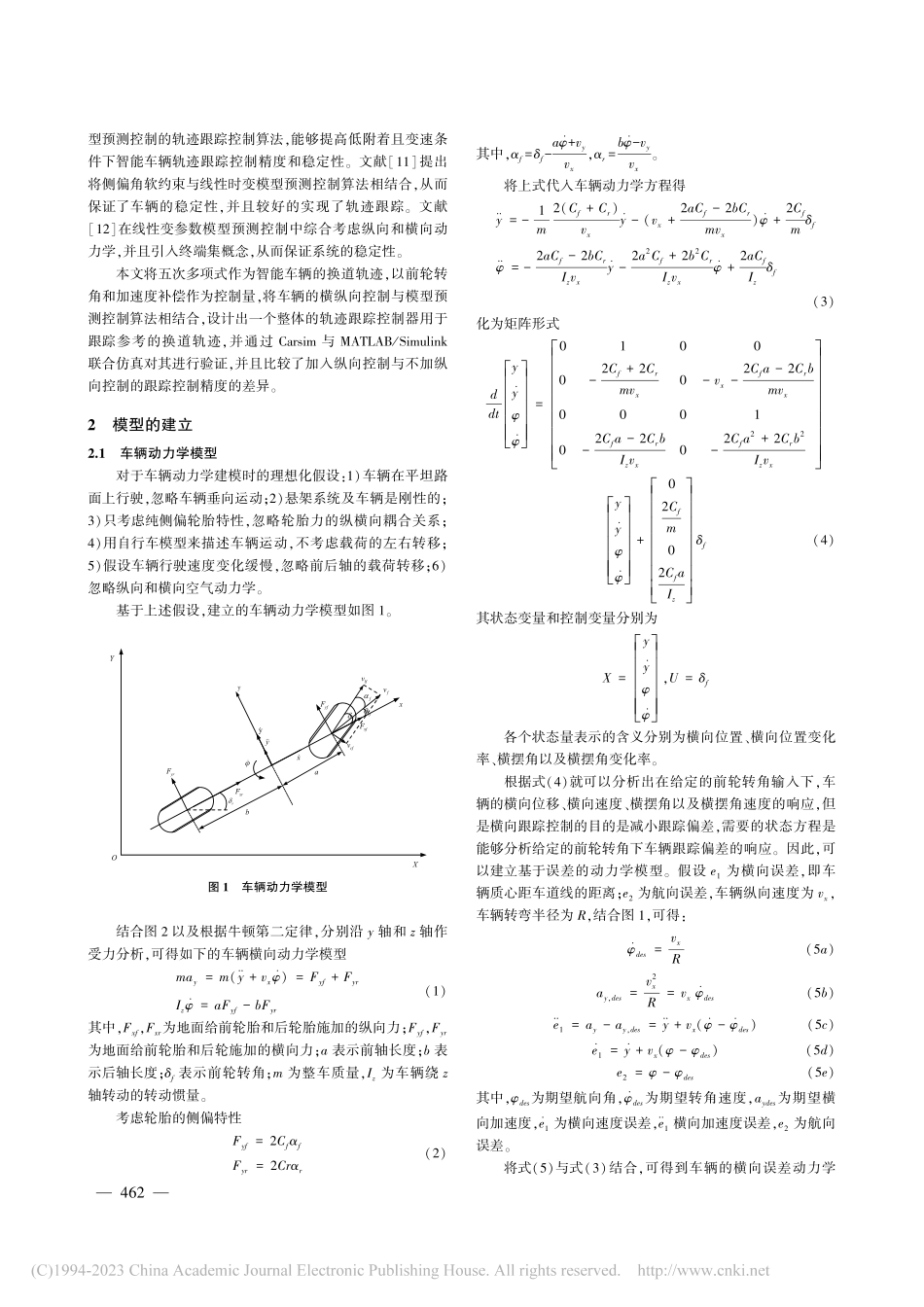
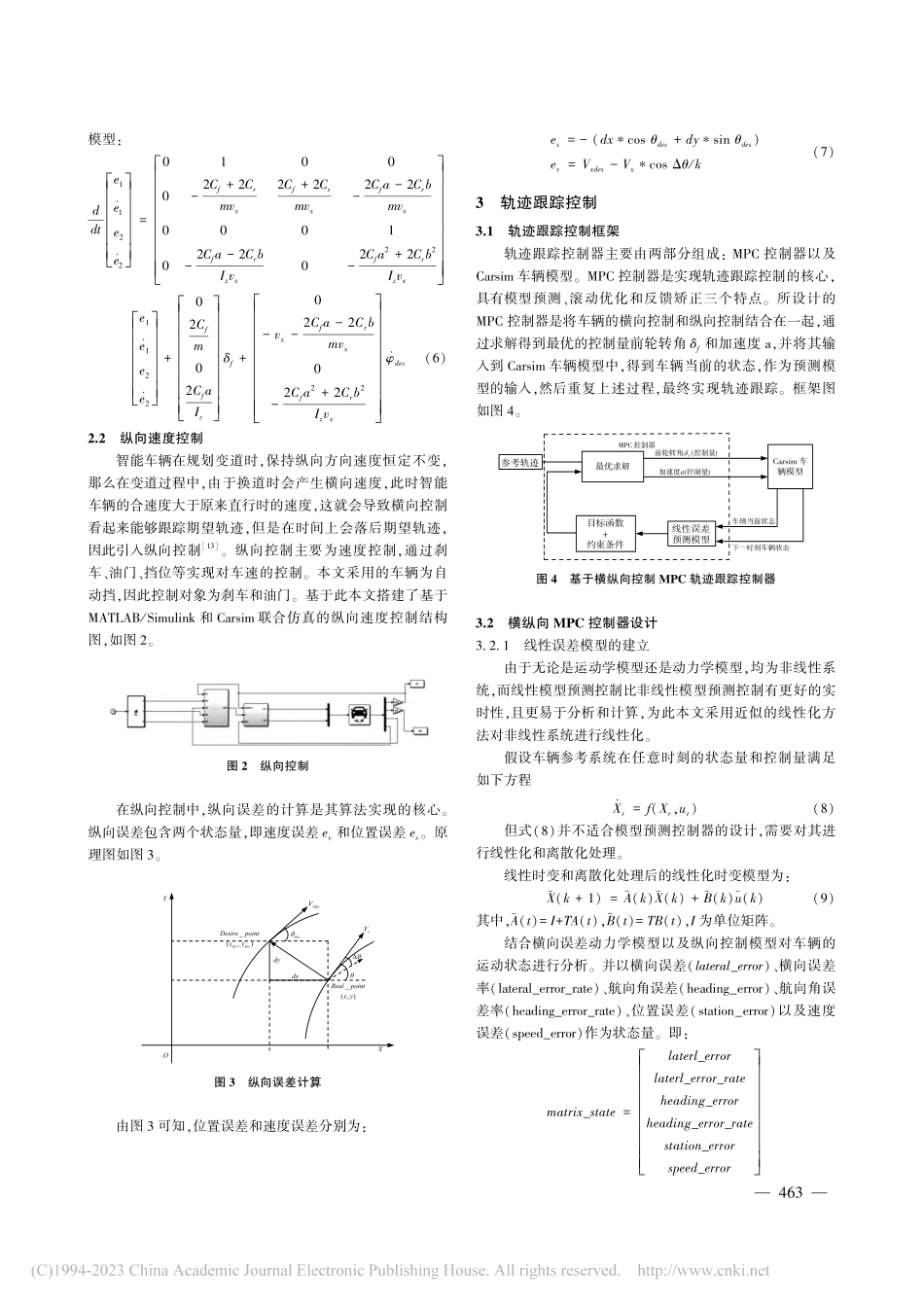
基金项目:国家自然科学基金(51505275)收稿日期:2021-05-18修回日期:2021-05-24第40卷第4期计算机仿真2023年4月文章编号:1006-9348(2023)04-0461-08基于横纵向MPC的智能车换道控制算法孙志伟,李聪(上海工程技术大学机械与汽车工程学院,上海201620)摘要:为了保证智能车辆在不同车速以及极限工况下跟踪控制的精确性和稳定性,提出了一种结合横纵向控制的模型预测控制(MPC)的轨迹跟踪控制算法。首先建立基于车辆动力学模型的横向误差动力学模型以及车辆纵向控制模型,设计基于横纵向控制的MPC控制器,通过MATLAB/Simulink和CarSim进行仿真验证。仿真结果表明,控制器具有较好的跟踪精度和鲁棒性。将所设计的控制器与未添加纵向控制的MPC控制器进行对比分析,仿真结果表明,添加纵向控制后MPC控制器跟踪精度更优。关键词:智能车辆;横向控制;纵向控制;轨迹跟踪;模型预测控制中图分类号:U461文献标识码:BLaneChangeControlAlgorithmofIntelligentVehicleBasedonLateralandLongitudinalMPCSUNZhi-wei,LICong(ShanghaiUniversityofEngineeringScience,SchoolofMechanicalandAutomotiveEngineering,Shanghai201620,China)ABSTRACT:Inordertoensuretheaccuracyandstabilityoftrackingcontrolofintelligentvehiclesatdifferentspeedsandextremeconditions,atrajectorytrackingcontrolalgorithmbasedonmodelpredictivecontrol(MPC)com-binedwithlateralandlongitudinalcontrolwasproposed.Firstly,thelateralerrordynamicsmodelbasedonvehicledynamicsmodelandvehiclelongitudinalcontrolmodelwereestablished,andtheMPCcontrollerbasedonlateralandlongitudinalcontrolwasdesigned,whichwasverifiedbyMatlab/SimulinkandCarSimsimulation.Simulationresultsshowthatthecontrollerhasbettertrackingaccuracyandrobustness.Then,onthisbasis,thedesignedcontrollerwascomparedwiththeMPCcontrollerwithoutlongitudinalcontrol,andthesimulationresultsshowthattheMPCcontrol-lerwithlongitudinalcontrolhasbettertrackingaccuracy.KEYWORDS:Intelligentvehicle;Lateralcontrol;Longitudinalcontrol;Trajectorytracking;Modelpredictivecontrol1引言轨迹跟踪控制是智能车辆[1]研究领域的热点之一。轨迹跟踪是指通过控制车辆转向,使得车辆可以按照事先给定的参考轨迹的路线行驶[2]。在跟踪控制方面,其算法主要有滑模控制、模糊控制、鲁棒控制和模型预测控制等。文献[3]将...