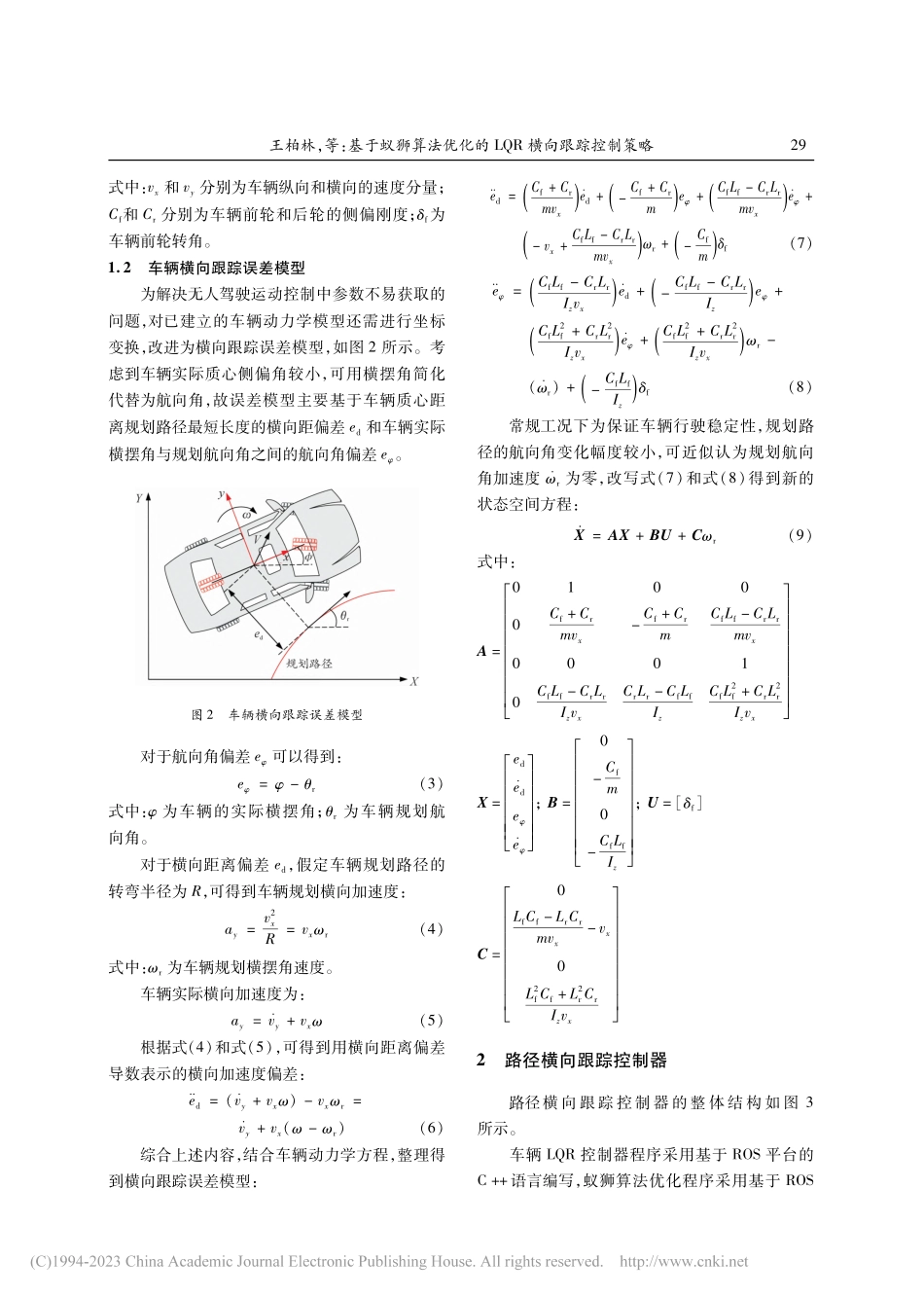
JournalofChongqingUniversityofTechnology(NaturalScience)2023年第37卷第4期Vol.37No.42023收稿日期:2022-12-08基金项目:贵州省科技计划项目(黔科合支撑〔2021〕一般171)作者简介:王柏林,男,硕士研究生,主要从事智能汽车路径跟踪控制研究,E-mail:wbl17792615320@163.com;通信作者李云伍,男,博士,教授,主要从事智能汽车环境感知、路径规划及跟踪控制研究,E-mail:liywu@swu.edu.cn。本文引用格式:王柏林,李云伍,赵颖,等.基于蚁狮算法优化的LQR横向跟踪控制策略[J].重庆理工大学学报(自然科学),2023,37(4):27-38.Citationformat:WANGBolin,LIYunwu,ZHAOYing,etal.LQRlateraltrackingcontrolstrategybasedonALOalgorithm[J].JournalofChongqingUniversityofTechnology(NaturalScience),2023,37(4):27-38.doi:10.3969/j.issn.1674-8425(z).2023.04.004基于蚁狮算法优化的LQR横向跟踪控制策略王柏林1,李云伍1,2,赵颖1,2,宋胜1,王月强3(1.西南大学工程技术学院,重庆400715;2.丘陵山区农业装备重庆市重点实验室,重庆400716;3.重庆长安汽车软件科技有限公司,重庆400021)摘要:为解决线性二次型调节器(LQR)在经典固定权重系数下对大曲率参考路径适应性不佳致使车辆跟踪精度与稳定性欠佳的问题,设计了一种基于蚁狮算法(ALO)优化的带有预瞄前馈转角补偿的自适应权重系数LQR控制器以进行路径横向跟踪。基于2自由度车辆动力学横向跟踪误差模型设计了经典LQR控制器。采用预瞄前馈控制消除误差模型简化带来的稳态误差。提出以横向距离偏差、航向角偏差和输出前轮转角为评价函数,基于蚁狮算法优化的自适应LQR权重系数修正策略。通过实车测验,验证了控制器在实车环境下的控制效果。结果表明:所设计的控制器能够适应大曲率参考路径,并兼顾路径跟踪精准性和行驶稳定性,同时针对不同车速鲁棒性表现优异。关键词:智能汽车;横向跟踪;LQR控制;...