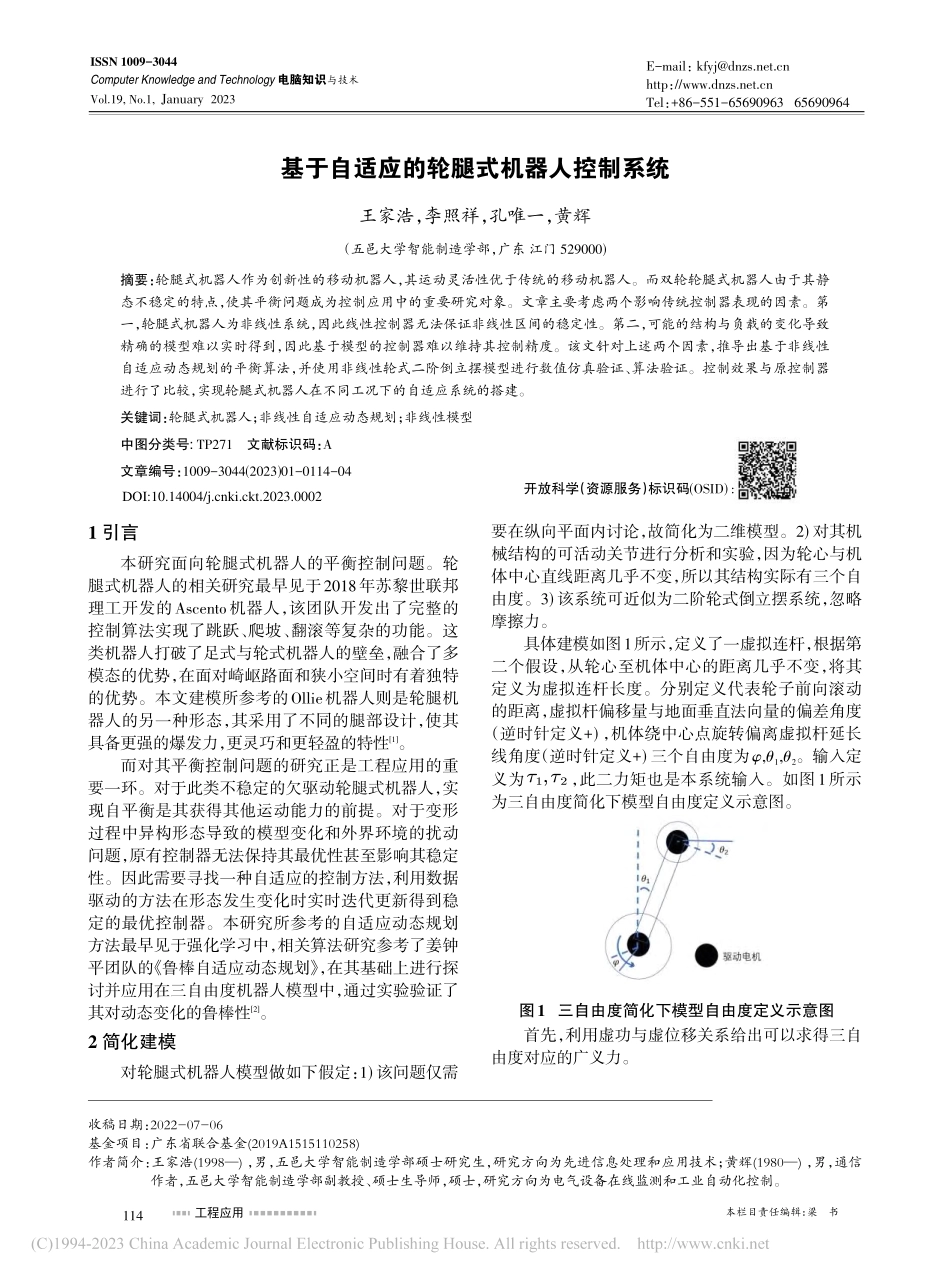
本栏目责任编辑:梁书工程应用ComputerKnowledgeandTechnology电脑知识与技术第19卷第1期(2023年1月)基于自适应的轮腿式机器人控制系统王家浩,李照祥,孔唯一,黄辉(五邑大学智能制造学部,广东江门529000)摘要:轮腿式机器人作为创新性的移动机器人,其运动灵活性优于传统的移动机器人。而双轮轮腿式机器人由于其静态不稳定的特点,使其平衡问题成为控制应用中的重要研究对象。文章主要考虑两个影响传统控制器表现的因素。第一,轮腿式机器人为非线性系统,因此线性控制器无法保证非线性区间的稳定性。第二,可能的结构与负载的变化导致精确的模型难以实时得到,因此基于模型的控制器难以维持其控制精度。该文针对上述两个因素,推导出基于非线性自适应动态规划的平衡算法,并使用非线性轮式二阶倒立摆模型进行数值仿真验证、算法验证。控制效果与原控制器进行了比较,实现轮腿式机器人在不同工况下的自适应系统的搭建。关键词:轮腿式机器人;非线性自适应动态规划;非线性模型中图分类号:TP271文献标识码:A文章编号:1009-3044(2023)01-0114-04开放科学(资源服务)标识码(OSID):1引言本研究面向轮腿式机器人的平衡控制问题。轮腿式机器人的相关研究最早见于2018年苏黎世联邦理工开发的Ascento机器人,该团队开发出了完整的控制算法实现了跳跃、爬坡、翻滚等复杂的功能。这类机器人打破了足式与轮式机器人的壁垒,融合了多模态的优势,在面对崎岖路面和狭小空间时有着独特的优势。本文建模所参考的Ollie机器人则是轮腿机器人的另一种形态,其采用了不同的腿部设计,使其具备更强的爆发力,更灵巧和更轻盈的特性[1]。而对其平衡控制问题的研究正是工程应用的重要一环。对于此类不稳定的欠驱动轮腿式机器人,实现自平衡是其获得其他运动能力的前提。对于变形过程中异构形态导致的模型变化和外界环境的扰动问题,原有控制器无法保持其最优性甚至影响其稳定性。因此需要寻找一种自适应的控制方法,利用数据驱动的方法在形态发生变化时实时迭代更新得到稳定的最优控制器。本研究所参考的自适应动态规划方法最早见于强化学习中,相关算法研究参考了姜钟平团队的《鲁棒自适应动态规划》,在其基础上进行探讨并应用在三自由度机器人模型中,通过实验验证了其对动态变化的鲁棒性[2]。2简化建模对轮腿式机器人模型做如下假定:1)该问题仅需要在纵向平面内讨论,故简化为二维模型。2)对其机械结构的可活动关节进行分析和实验,因为轮心与机体中心直线距...