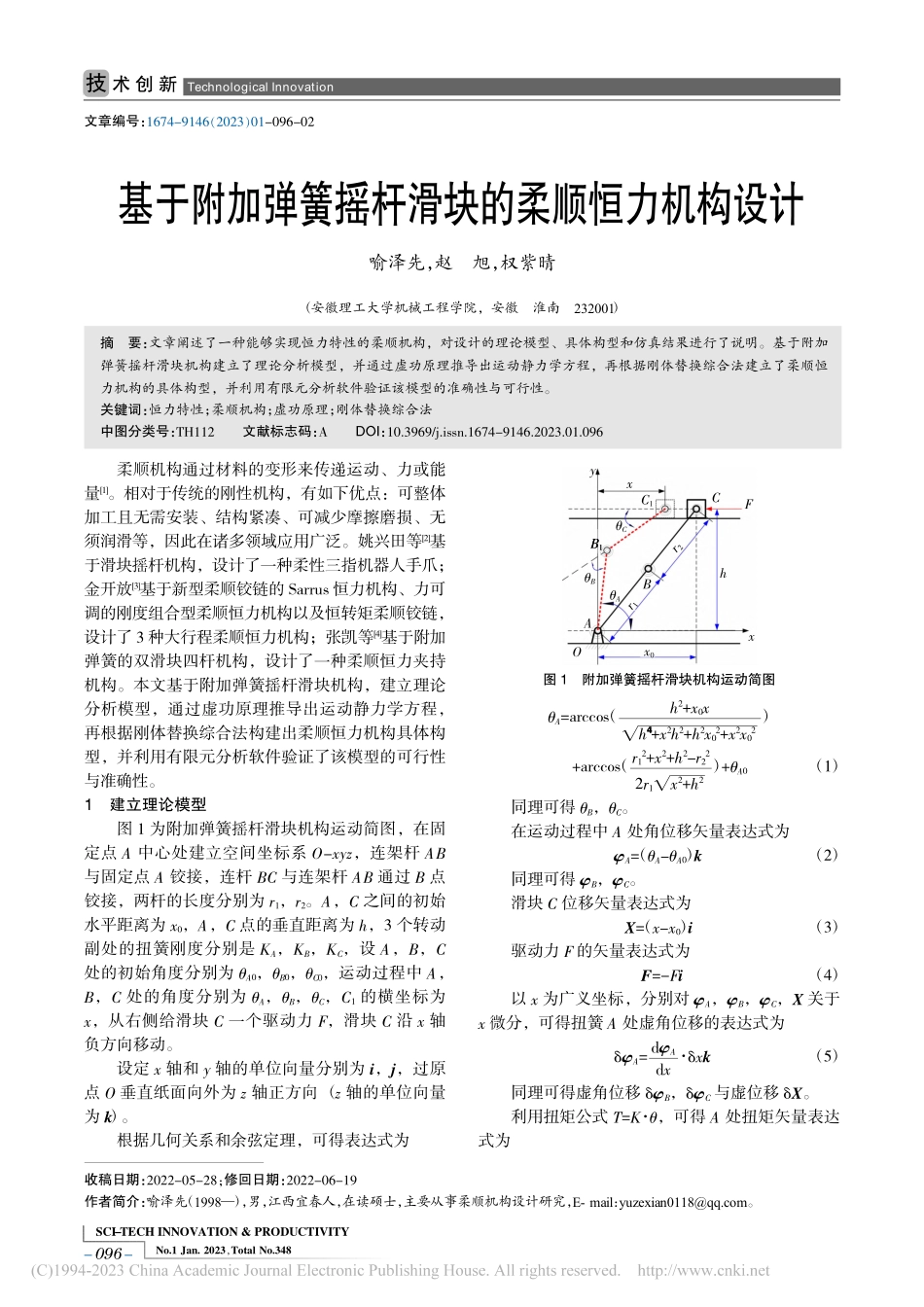
SCI-TECHINNOVATION&PRODUCTIVITYNo.1Jan.2023,TotalNo.348基于附加弹簧摇杆滑块的柔顺恒力机构设计收稿日期:2022-05-28;修回日期:2022-06-19作者简介:喻泽先(1998—),男,江西宜春人,在读硕士,主要从事柔顺机构设计研究,E-mail:yuzexian0118@qq.com。喻泽先,赵旭,权紫晴摘要:文章阐述了一种能够实现恒力特性的柔顺机构,对设计的理论模型、具体构型和仿真结果进行了说明。基于附加弹簧摇杆滑块机构建立了理论分析模型,并通过虚功原理推导出运动静力学方程,再根据刚体替换综合法建立了柔顺恒力机构的具体构型,并利用有限元分析软件验证该模型的准确性与可行性。关键词:恒力特性;柔顺机构;虚功原理;刚体替换综合法中图分类号:TH112文献标志码:ADOI:10.3969/j.issn.1674-9146.2023.01.096(安徽理工大学机械工程学院,安徽淮南232001)文章编号:1674-9146(2023)01-096-02柔顺机构通过材料的变形来传递运动、力或能量[1]。相对于传统的刚性机构,有如下优点:可整体加工且无需安装、结构紧凑、可减少摩擦磨损、无须润滑等,因此在诸多领域应用广泛。姚兴田等[2]基于滑块摇杆机构,设计了一种柔性三指机器人手爪;金开放[3]基于新型柔顺铰链的Sarrus恒力机构、力可调的刚度组合型柔顺恒力机构以及恒转矩柔顺铰链,设计了3种大行程柔顺恒力机构;张凯等[4]基于附加弹簧的双滑块四杆机构,设计了一种柔顺恒力夹持机构。本文基于附加弹簧摇杆滑块机构,建立理论分析模型,通过虚功原理推导出运动静力学方程,再根据刚体替换综合法构建出柔顺恒力机构具体构型,并利用有限元分析软件验证了该模型的可行性与准确性。1建立理论模型图1为附加弹簧摇杆滑块机构运动简图,在固定点A中心处建立空间坐标系O-xyz,连架杆AB与固定点A铰接,连杆BC与连架杆AB通过B点铰接,两杆的长度分别为r1,r2。A,C之间的初始水平距离为x0,A,C点的垂直距离为h,3个转动副处的扭簧刚度分别是KA,KB,KC,设A,B,C处的初始角度分别为θA0,θB0,θC0,运动过程中A,B,C处的角度分别为θA,θB,θC,C1的横坐标为x,从右侧给滑块C一个驱动力F,滑块C沿x轴负方向移动。设定x轴和y轴的单位向量分别为i,j,过原点O垂直纸面向外为z轴正方向(z轴的单位向量为k)。根据几何关系和余弦定理,可得表达式为θA=arccos(h2+x0xh4+x2h2+h2x02+x2x02■)+arccos(r12+x2+h2-r222r1x2+h2■)+θA0(1)同理可得θB,θC。在运动过程中A处角位移矢量表...