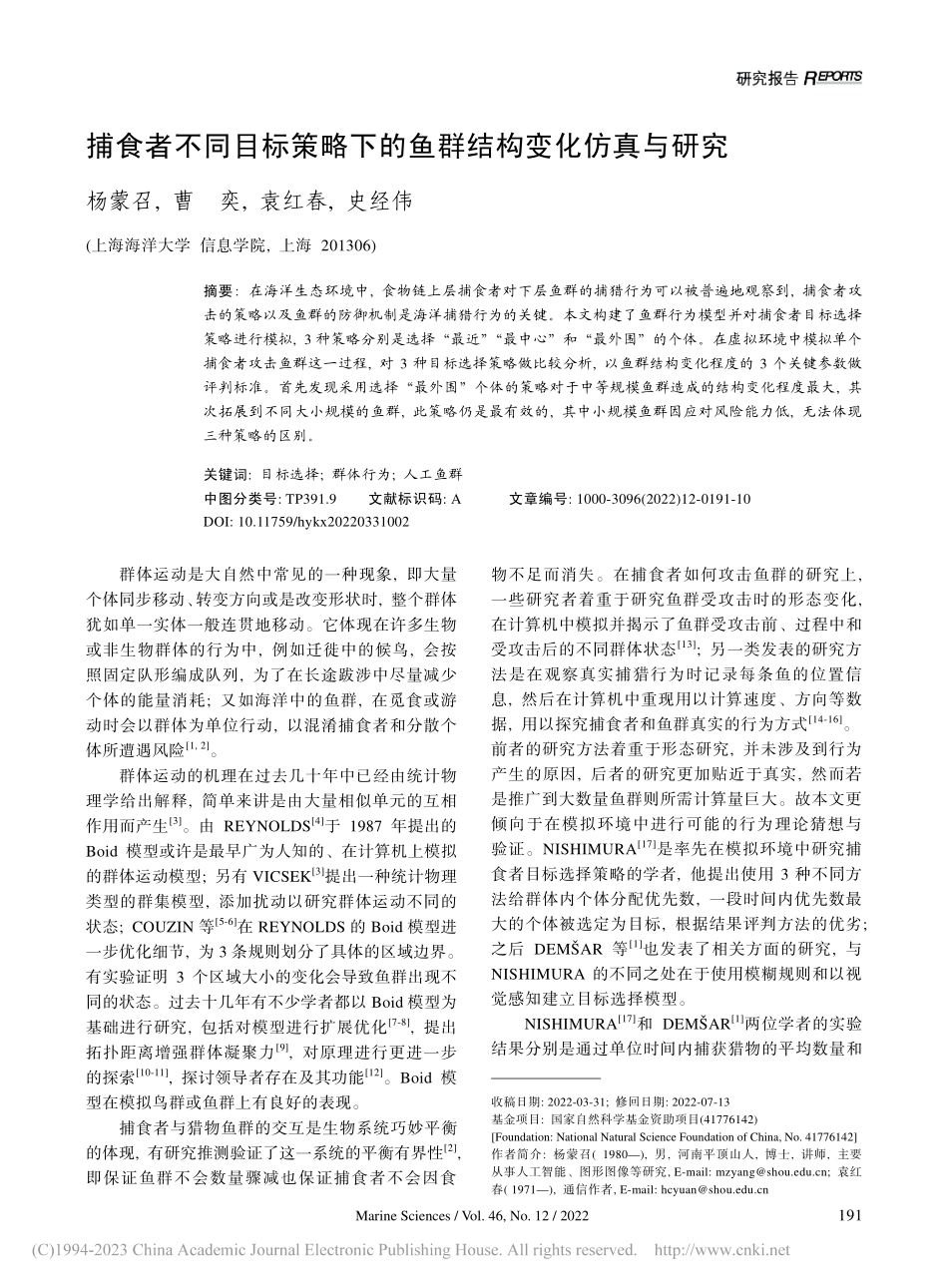
MarineSciences/Vol.46,No.12/2022191捕食者不同目标策略下的鱼群结构变化仿真与研究杨蒙召,曹奕,袁红春,史经伟(上海海洋大学信息学院,上海201306)摘要:在海洋生态环境中,食物链上层捕食者对下层鱼群的捕猎行为可以被普遍地观察到,捕食者攻击的策略以及鱼群的防御机制是海洋捕猎行为的关键。本文构建了鱼群行为模型并对捕食者目标选择策略进行模拟,3种策略分别是选择“最近”“最中心”和“最外围”的个体。在虚拟环境中模拟单个捕食者攻击鱼群这一过程,对3种目标选择策略做比较分析,以鱼群结构变化程度的3个关键参数做评判标准。首先发现采用选择“最外围”个体的策略对于中等规模鱼群造成的结构变化程度最大,其次拓展到不同大小规模的鱼群,此策略仍是最有效的,其中小规模鱼群因应对风险能力低,无法体现三种策略的区别。关键词:目标选择;群体行为;人工鱼群中图分类号:TP391.9文献标识码:A文章编号:1000-3096(2022)12-0191-10DOI:10.11759/hykx20220331002群体运动是大自然中常见的一种现象,即大量个体同步移动、转变方向或是改变形状时,整个群体犹如单一实体一般连贯地移动。它体现在许多生物或非生物群体的行为中,例如迁徙中的候鸟,会按照固定队形编成队列,为了在长途跋涉中尽量减少个体的能量消耗;又如海洋中的鱼群,在觅食或游动时会以群体为单位行动,以混淆捕食者和分散个体所遭遇风险[1,2]。群体运动的机理在过去几十年中已经由统计物理学给出解释,简单来讲是由大量相似单元的互相作用而产生[3]。由REYNOLDS[4]于1987年提出的Boid模型或许是最早广为人知的、在计算机上模拟的群体运动模型;另有VICSEK[3]提出一种统计物理类型的群集模型,添加扰动以研究群体运动不同的状态;COUZIN等[5-6]在REYNOLDS的Boid模型进一步优化细节,为3条规则划分了具体的区域边界。有实验证明3个区域大小的变化会导致鱼群出现不同的状态。过去十几年有不少学者都以Boid模型为基础进行研究,包括对模型进行扩展优化[7-8],提出拓扑距离增强群体凝聚力[9],对原理进行更进一步的探索[10-11],探讨领导者存在及其功能[12]。Boid模型在模拟鸟群或鱼群上有良好的表现。捕食者与猎物鱼群的交互是生物系统巧妙平衡的体现,有研究推测验证了这一系统的平衡有界性[2],即保证鱼群不会数量骤减也保证捕食者不会因食物不足而消失。在捕食者如何攻击鱼群的研究上,一些研究者着重于研究鱼群受攻击时的形态变化,在计算机中模拟并揭示了鱼群受攻击前、过程中和受攻击后的不同群体状态[13];...