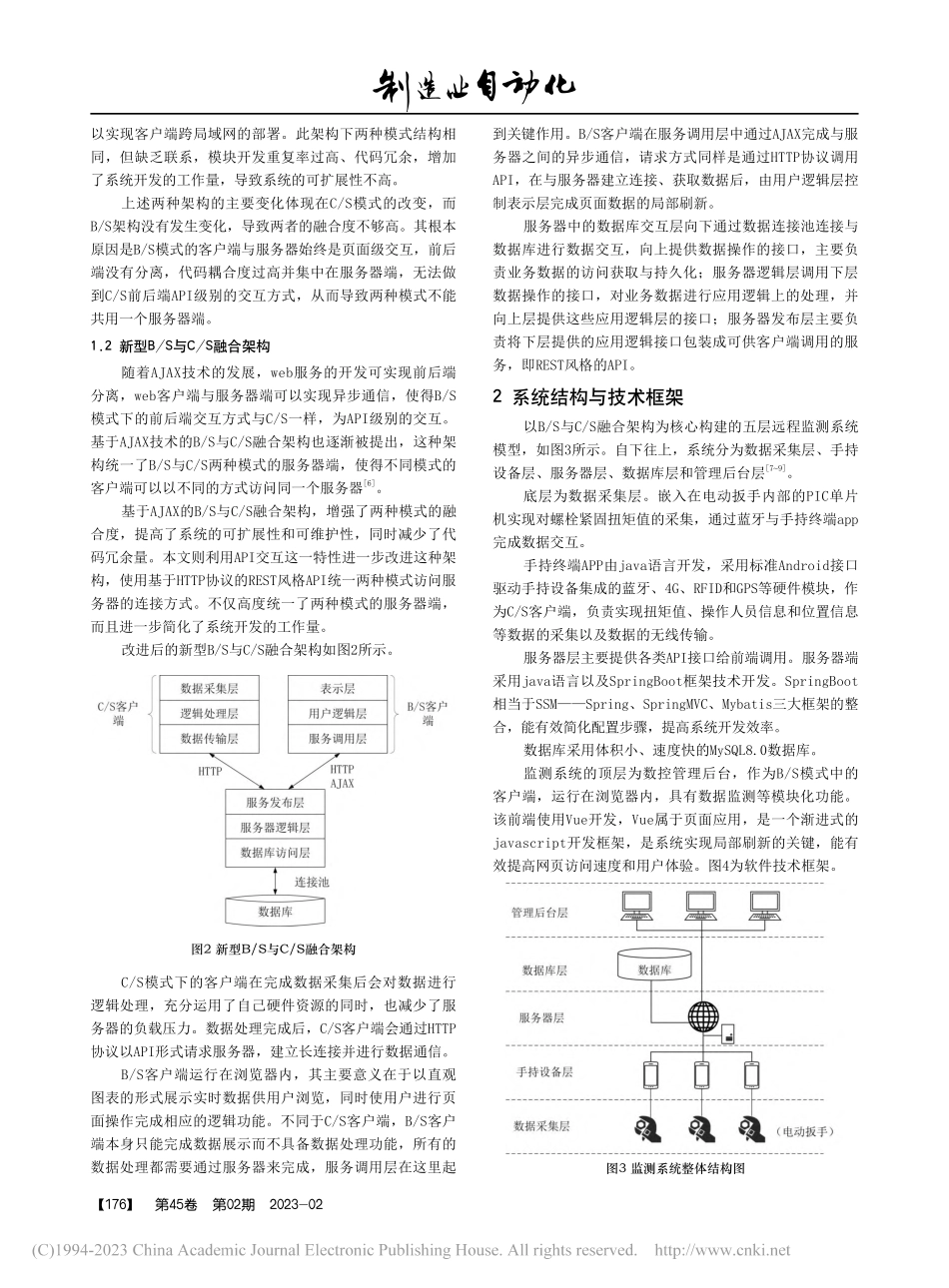
第45卷第02期2023-02【175】收稿日期:2021-04-23基金项目:2019年省科技重大专项立项项目(201903a05020039)作者简介:范学伟(1997-),男,安徽天长人,硕士研究生,研究方向为控制科学与工程。基于B/S与C/S融合架构的电动扭矩扳手远程监测系统设计DesignofremotemonitoringsystemforelectrictorquewrenchbasedonB/SandC/Sfusionarchitecture范学伟*,谢峰,汪小武,唐楠FANXue-wei*,XIEFeng,WANGXiao-wu,TANGNan(安徽大学电气工程与自动化学院,合肥230601)摘要:在输电铁塔建设中,其安全性往往与螺栓紧固质量密不可分,针对当前电动扭矩扳手数据传输效率低、数据集成化程度低,导致螺栓紧固质量无法追溯等问题,提出一款远程监测系统。系统采用新型B/S与C/S融合架构,统一B/S和C/S前后端交互方式,实现服务器端共享,具有一定的可扩展性和可维护性。系统能实现对电动扳手输出扭矩、操作人员状态和位置状态监测预警,并集成计划管理、报警提示、权限管理等模块化功能,为管理者远程干预施工现场提供依据。系统稳定、高效,具有一定的应用与推广价值。关键词:B/S;C/S;电动扳手;远程监测;模块化中图分类号:TP393文献标志码:A文章编号:1009-0134(2023)02-0175-040引言电动扭矩扳手因其操作方便、省时省力被广泛应用在输电铁塔高强度螺栓的紧固中。然而施工过程中,工人如果没有按照操作规范使用电动扳手紧固螺栓,导致螺栓松动,将直接影响铁塔的稳定性,甚至引发安全事故[1,2]。因此,实现对电动扳手作业参数的远程实时监测是尤为必要的。近年来,电动数控扭矩扳手不断更新发展,其扭矩控制精度和操作便携性有了显著提升,但数据传输距离有限、实时性不够且数据集成化程度较低,数据所对应的操作对象、时间、位置等信息缺失[3]。针对这一现象,有学者提出了基于C/S(client/server)架构的数据传输系统,弥补了当前数控扭矩扳手的不足,该系统能实现底层数据的实时上传,但无法实现自上而下的管理[4]。本文提出基于B/S(browser/server)与C/S(client/server)融合架构的电动扭矩扳手远程监测系统,分析并改进现有的B/S与C/S融合架构,在此架构基础之上搭建五层监测系统结构模型。手持终端APP通过蓝牙连接电动扳手控制系统,实现对电动扳作业相关数据的实时采集、上传;管理后台利用融合架构的特性扩展多元模块化功能,使管理者能够远程监控扳手作业现场,实现系统自上而下的管理。系统能有效减少现场施工事故发生率,提高铁塔建...