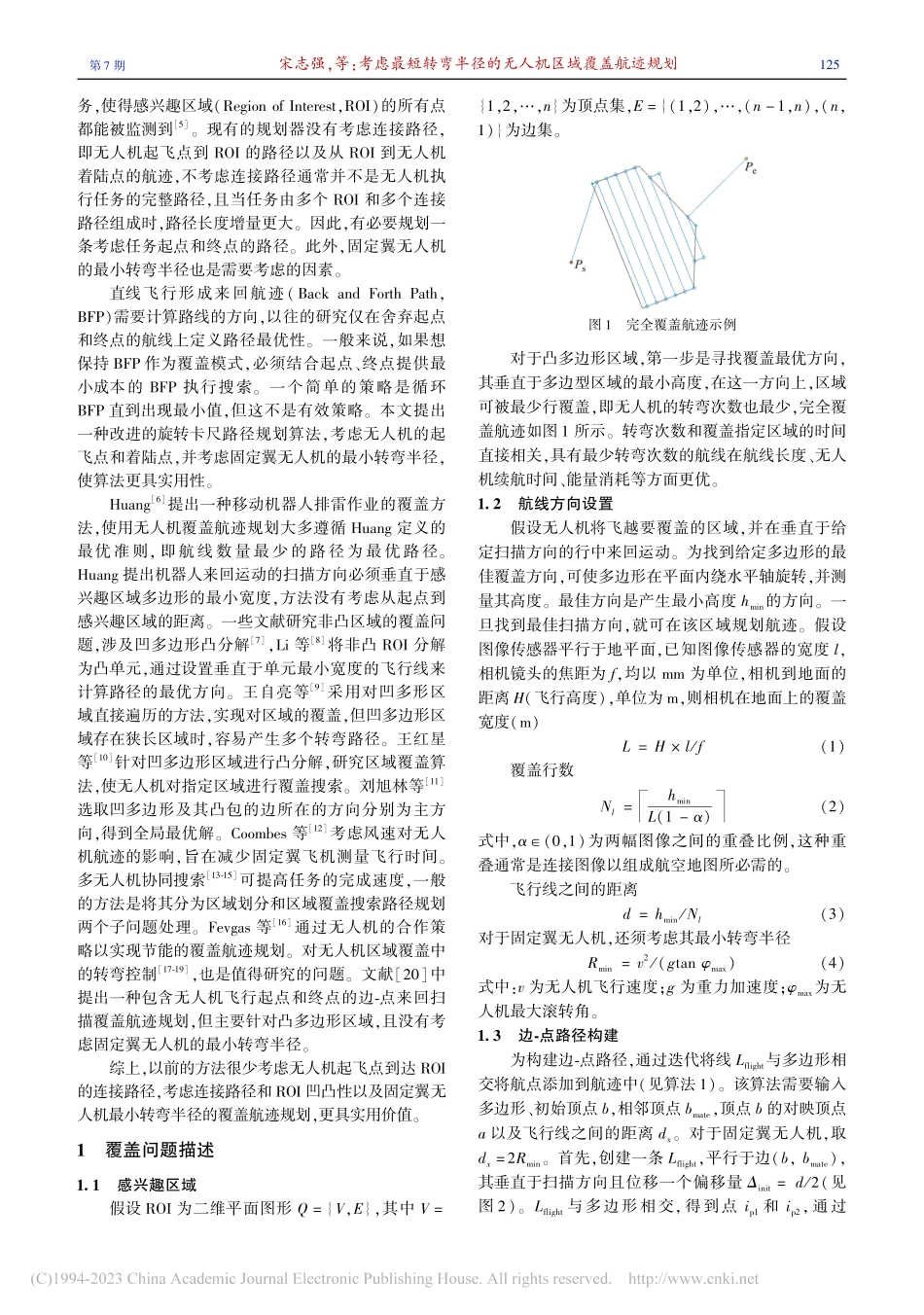
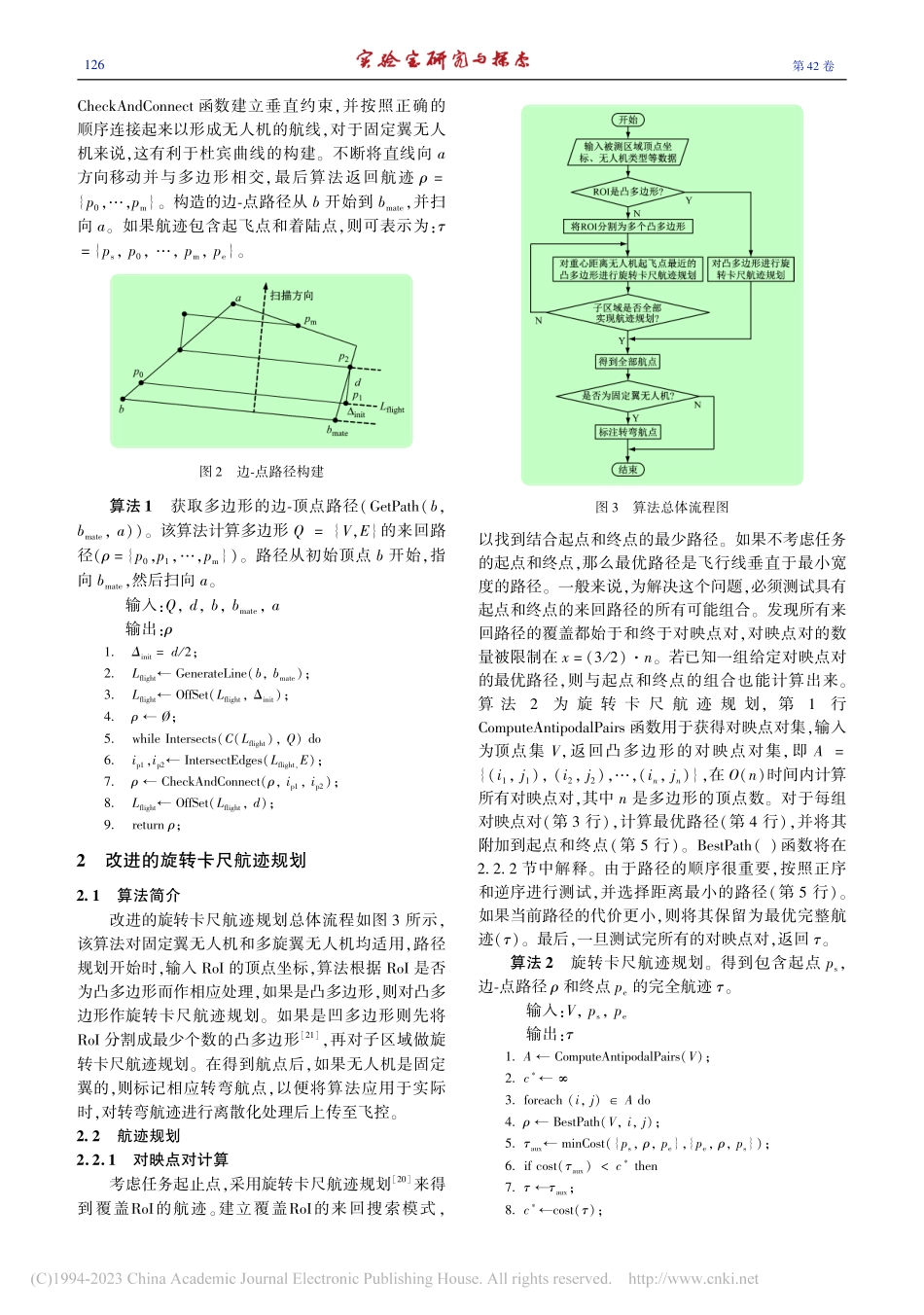
ISSN1006-7167CN31-1707/TRESEARCHANDEXPLORATIONINLABORATORY第42卷第7期Vol.42No.72023年7月Jul.2023DOI:10.19927/j.cnki.syyt.2023.07.025考虑最短转弯半径的无人机区域覆盖航迹规划宋志强1,陈少博2(1.无锡学院自动化学院,江苏无锡214105;2.南京信息工程大学滨江学院自动化学院,江苏无锡214105)摘要:为实现无人机测量自动化,必须解决覆盖航迹规划,即无人机路径规划,以便监测感兴趣区域内的所有点。为此,提出改进的旋转卡尺航迹规划算法,综合考虑被测区域的凹凸性、无人机类型、无人机起飞点、着陆点,计算最优边⁃点来回航迹,构成完整的覆盖航迹。被测区域是凹多边形,则将其分割为具有最小个数的凸边形;如果采用固定翼无人机,则需要考虑其最小转弯半径,进行航迹规划。仿真结果表明,改进的航迹规划算法更具实用性和有效性。关键词:无人机;覆盖航迹规划;最小转弯半径;凹多边形分割中图分类号:TP79;V279文献标志码:A文章编号:1006-7167(2023)07-0124-06UAVAreaCoveragePathPlanningbyConsideringtheShortestTurningRadiusSONGZhiqiang1,CHENShaobo2(1.SchoolofAutomation,WuxiUniversity,Wuxi214105,Jingsu,China;2.SchoolofAutomation,BinjiangCollegeofNanjingUniversityofInformationScienceandTechnology,Wuxi214105,Jingsu,China)Abstract:Toautomaticallycompletethemeasurementtask,thecoveragepathplanningproblemmustbesolved,whichistocomputethepathoftheUAVinordertomonitorallpointsintheinterestedregion.Animprovedrotatingcaliperpathplanningalgorithmisproposedbycomprehens...