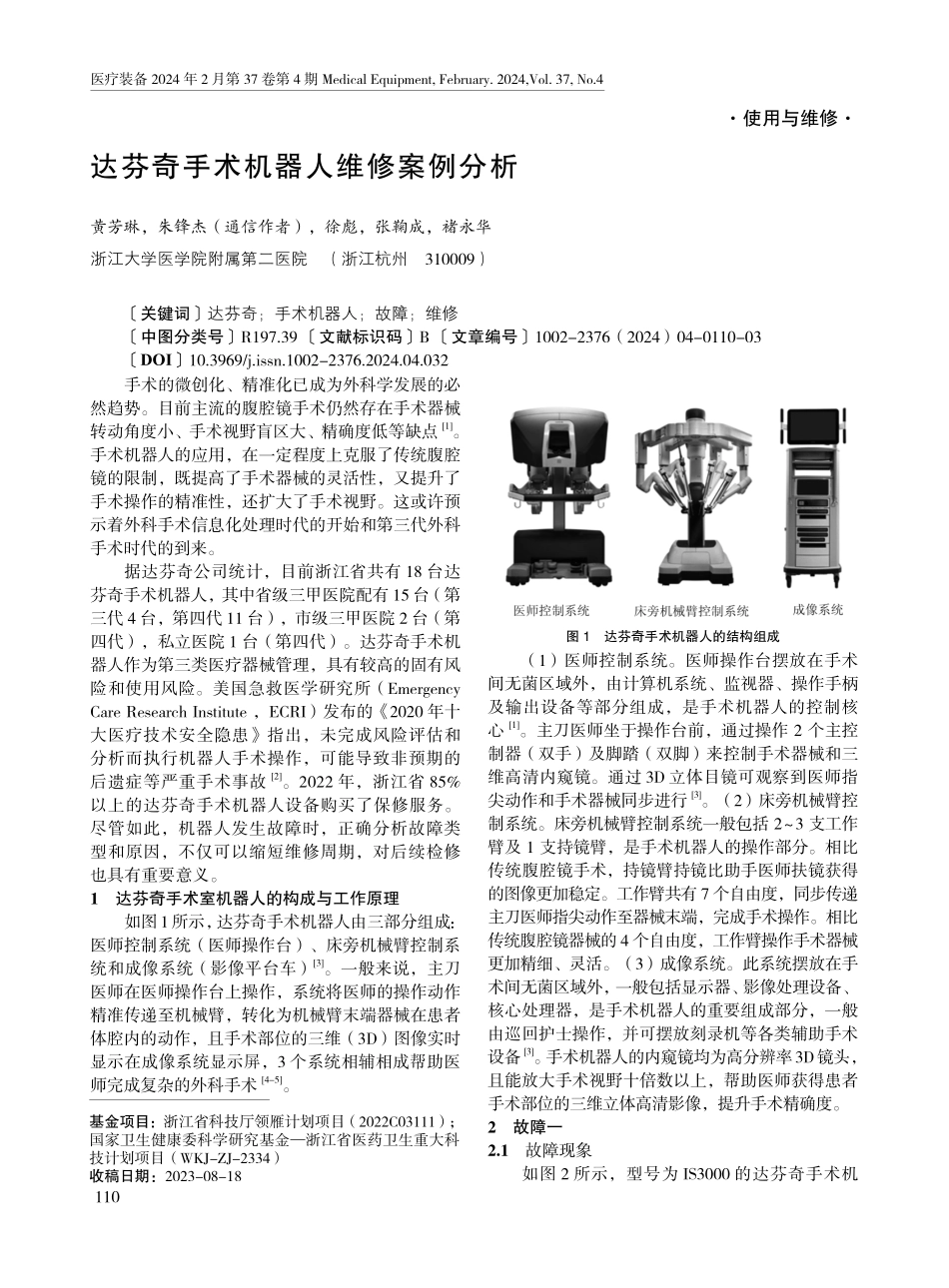
110医疗装备2024年2月第37卷第4期MedicalEquipment,February.2024,Vol.37,No.4手术的微创化、精准化已成为外科学发展的必然趋势。目前主流的腹腔镜手术仍然存在手术器械转动角度小、手术视野盲区大、精确度低等缺点[1]。手术机器人的应用,在一定程度上克服了传统腹腔镜的限制,既提高了手术器械的灵活性,又提升了手术操作的精准性,还扩大了手术视野。这或许预示着外科手术信息化处理时代的开始和第三代外科手术时代的到来。据达芬奇公司统计,目前浙江省共有18台达芬奇手术机器人,其中省级三甲医院配有15台(第三代4台,第四代11台),市级三甲医院2台(第四代),私立医院1台(第四代)。达芬奇手术机器人作为第三类医疗器械管理,具有较高的固有风险和使用风险。美国急救医学研究所(EmergencyCareResearchInstitute,ECRI)发布的《2020年十大医疗技术安全隐患》指出,未完成风险评估和分析而执行机器人手术操作,可能导致非预期的后遗症等严重手术事故[2]。2022年,浙江省85%以上的达芬奇手术机器人设备购买了保修服务。尽管如此,机器人发生故障时,正确分析故障类型和原因,不仅可以缩短维修周期,对后续检修也具有重要意义。1达芬奇手术室机器人的构成与工作原理如图1所示,达芬奇手术机器人由三部分组成:医师控制系统(医师操作台)、床旁机械臂控制系统和成像系统(影像平台车)[3]。一般来说,主刀医师在医师操作台上操作,系统将医师的操作动作精准传递至机械臂,转化为机械臂末端器械在患者体腔内的动作,且手术部位的三维(3D)图像实时显示在成像系统显示屏,3个系统相辅相成帮助医师完成复杂的外科手术[4-5]。图1达芬奇手术机器人的结构组成(1)医师控制系统。医师操作台摆放在手术间无菌区域外,由计算机系统、监视器、操作手柄及输出设备等部分组成,是手术机器人的控制核心[1]。主刀医师坐于操作台前,通过操作2个主控制器(双手)及脚踏(双脚)来控制手术器械和三维高清内窥镜。通过3D立体目镜可观察到医师指尖动作和手术器械同步进行[3]。(2)床旁机械臂控制系统。床旁机械臂控制系统一般包括2~3支工作臂及1支持镜臂,是手术机器人的操作部分。相比传统腹腔镜手术,持镜臂持镜比助手医师扶镜获得的图像更加稳定。工作臂共有7个自由度,同步传递主刀医师指尖动作至器械末端,完成手术操作。相比传统腹腔镜器械的4个自由度,工作臂操作手术器械更加精细、灵活。(3)成像系统。此系统摆放在手术间无菌区域外,一般包括显...