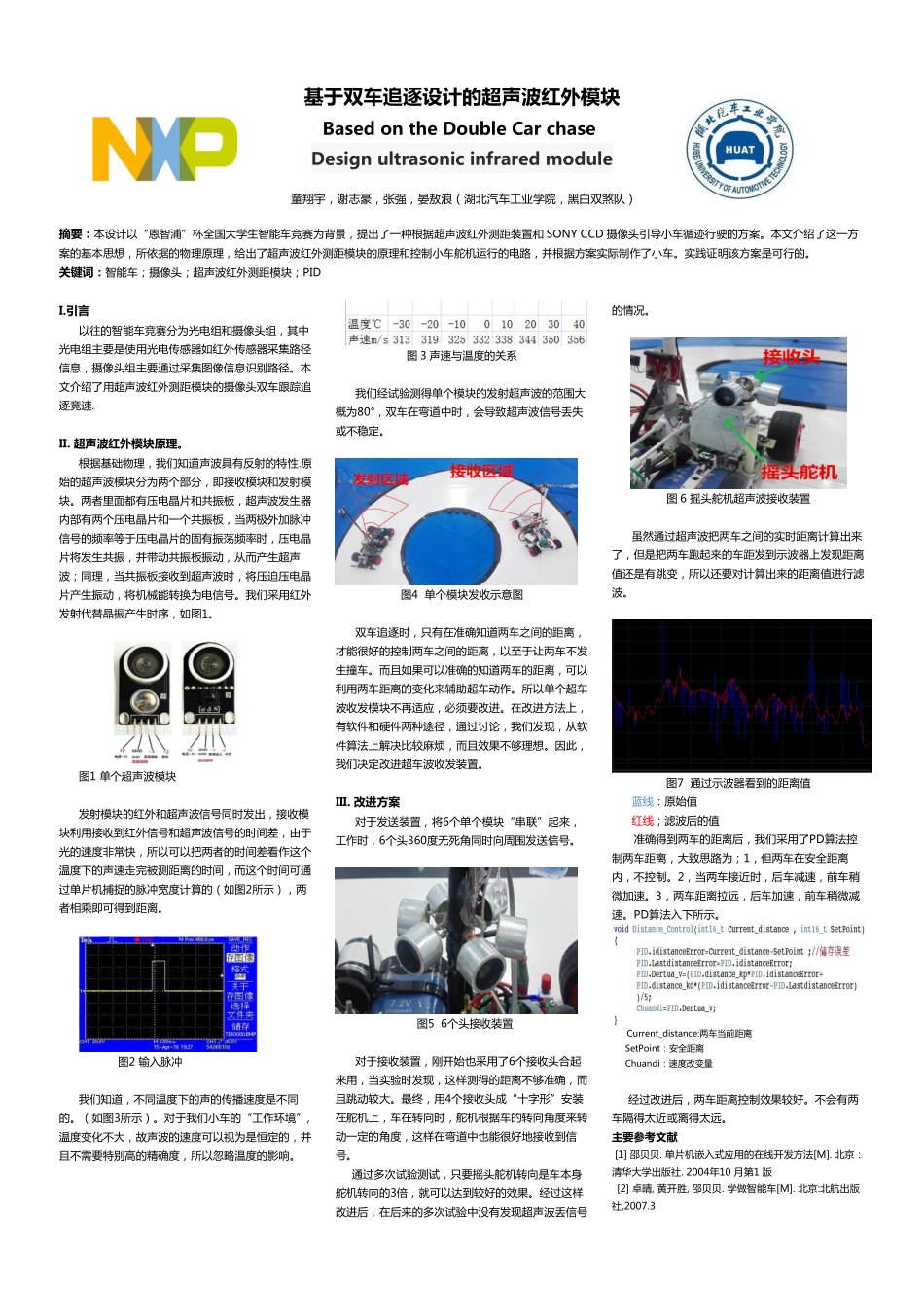
基于双车追逐设计的超声波红外模块BasedontheDoubleCarchaseDesignultrasonicinfraredmodule童翔宇,谢志豪,张强,晏敖浪(湖北汽车工业学院,黑白双煞队)摘要:本设计以“恩智浦”杯全国大学生智能车竞赛为背景,提出了一种根据超声波红外测距装置和SONYCCD摄像头引导小车循迹行驶的方案。本文介绍了这一方案的基本思想,所依据的物理原理,给出了超声波红外测距模块的原理和控制小车舵机运行的电路,并根据方案实际制作了小车。实践证明该方案是可行的。关键词:智能车;摄像头;超声波红外测距模块;PIDI.引言以往的智能车竞赛分为光电组和摄像头组,其中光电组主要是使用光电传感器如红外传感器采集路径信息,摄像头组主要通过采集图像信息识别路径。本文介绍了用超声波红外测距模块的摄像头双车跟踪追逐竞速.II.超声波红外模块原理。根据基础物理,我们知道声波具有反射的特性.原始的超声波模块分为两个部分,即接收模块和发射模块。两者里面都有压电晶片和共振板,超声波发生器内部有两个压电晶片和一个共振板,当两极外加脉冲信号的频率等于压电晶片的固有振荡频率时,压电晶片将发生共振,并带动共振板振动,从而产生超声波;同理,当共振板接收到超声波时,将压迫压电晶片产生振动,将机械能转换为电信号。我们采用红外发射代替晶振产生时序,如图1。图1单个超声波模块发射模块的红外和超声波信号同时发出,接收模块利用接收到红外信号和超声波信号的时间差,由于光的速度非常快,所以可以把两者的时间差看作这个温度下的声速走完被测距离的时间,而这个时间可通过单片机捕捉的脉冲宽度计算的(如图2所示),两者相乘即可得到距离。图2输入脉冲我们知道,不同温度下的声的传播速度是不同的。(如图3所示)。对于我们小车的“工作环境”,温度变化不大,故声波的速度可以视为是恒定的,并且不需要特别高的精确度,所以忽略温度的影响。图3声速与温度的关系我们经试验测得单个模块的发射超声波的范围大概为80°,双车在弯道中时,会导致超声波信号丢失或不稳定。图4单个模块发收示意图双车追逐时,只有在准确知道两车之间的距离,才能很好的控制两车之间的距离,以至于让两车不发生撞车。而且如果可以准确的知道两车的距离,可以利用两车距离的变化来辅助超车动作。所以单个超车波收发模块不再适应,必须要改进。在改进方法上,有软件和硬件两种途径,通过讨论,我们发现,从软件算法上解决比较麻烦,而且效果不够理想。因此,我们决定改进...