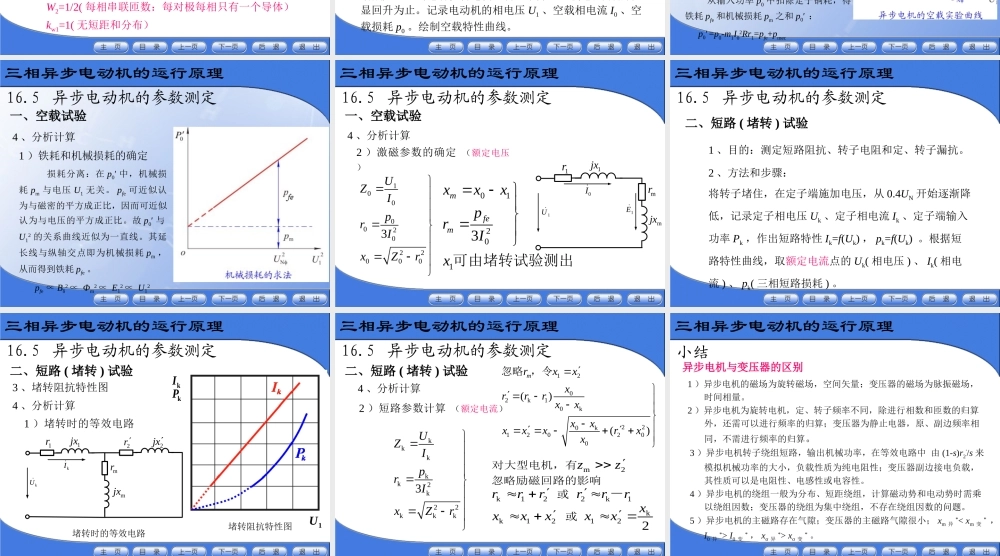
第十六章三相异步电动机的运行原理第十六章三相异步电动机的运行原理第三篇异步电机概述转子静止时的异步电动机转子旋转时的异步电动机笼型转子的极数、相数和匝数异步电动机的参数测定主要内容三相异步电动机的运行原理16.4笼型转子的极数、相数和匝数三相异步电动机的运行原理由绕线转子异步电动机分析得到的基本方程式、相量图和等效电路完全适用于笼型异步电动机。笼型转子的相数、极数和匝数如何确定?定、转子极数相等是旋转电机产生平均转矩的必要条件。绕线式转子有明显的相数和极数,且设计制造与定子相同16.4笼型转子的极数、相数和匝数三相异步电动机的运行原理一、笼型转子的极对数在空间按正弦分布的主磁场bδ相对于定子转速为n1,以n1′=n1-n=sn1的相对转速切割转子导条。在导条产生感应电动势ec,且ec与bδ成正比,故ec与bδ同相位。每根导条功率因数角为ψ2,导条中电流ic波滞后于ec波ψ2角。转子磁动势F2亦为正弦波,以转速n1相对于定子旋转。笼型转子无特定的极数,其极数始终等于定子的极数。b1n1n1ncecici216.4笼型转子的极数、相数和匝数三相异步电动机的运行原理二、笼型转子的相数设转子总导条数为Z2(即转子槽数),极对数为p,则相邻两根导条之间相差的空间电角度为α2=p·360º/Z2,这也是相邻两根转子导条电动势(电流)的相位相差的电角度。同相位的电流构成一相。导条分布均匀,一对磁极范围内的导条数为Z2/p,若Z2/p为整数,则相数m2=Z2/p;若Z2/p不为整数,则相数m2=Z2。W2=1/2(每相串联匝数:每对极每相只有一个导体)kw1=1(无短距和分布)三、笼型绕组的匝数和绕组因数16.5异步电动机的参数测定三相异步电动机的运行原理一、空载试验1、目的:测定铁耗pfe、机械损耗pm和激磁参数Zm=rm+jxm利用等效电路计算异步电动机的运行特性,应首先知道其参数。这些参数(r1,x1,r2′,x2′,rm,xm)可通过空载和短路(堵转)两个试验求得。2、方法和步骤:电机轴上不带负载,定子接到额定频率的三相对称电源上,通过三相调压器对电机供电,使定子端电压从(1.1~1.3)UN开始,逐渐降低电压,空载电流逐渐减少,直到电动机转速发生明显下降,空载电流开始明显回升为止。记录电动机的相电压U1、空载相电流I0、空载损耗p0。绘制空载特性曲线。16.5异步电动机的参数测定三相异步电动机的运行原理一、空载试验3、空载特性图4、分析计算1)铁耗和机械损耗的确定空载时,转子电流小,转子铜耗可忽略不计。...