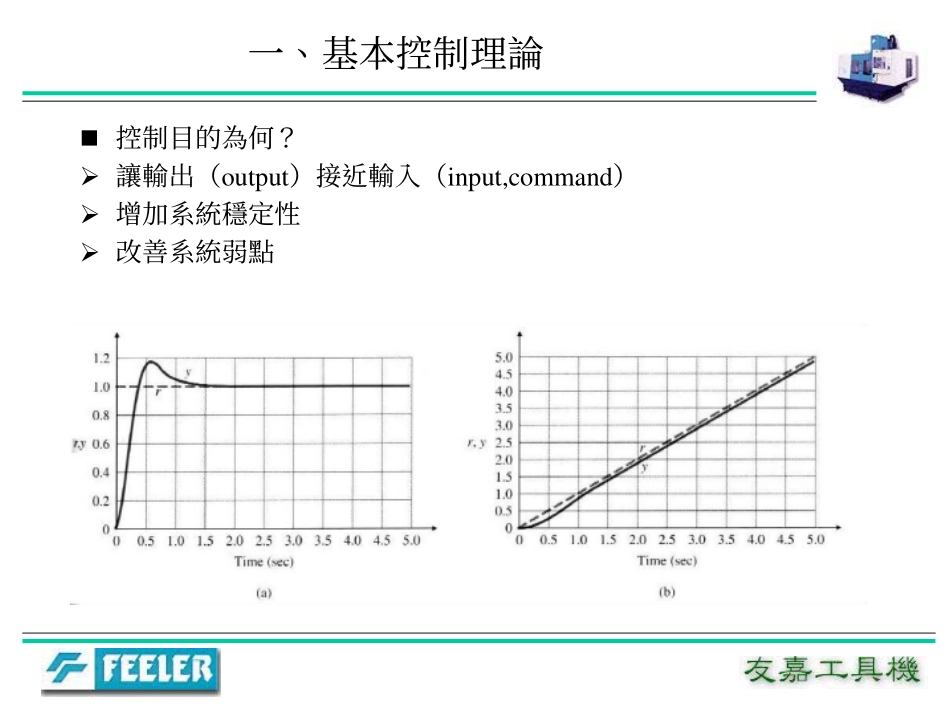
ParameterTuning技研課賴長慶日期:93/08/20Outline•Fundamentalcontroltheorem•ControlarchitecturesofCNC•Parametertuning–Servo–Motioncontrol•Conclusion一、基本控制理論�控制目的為何?�讓輸出(output)接近輸入(input,command)�增加系統穩定性�改善系統弱點開迴路與閉迴路控制時域與頻域響應目的:了解控制器及系統的狀態時域響應分析1.ts(settlingtime)2.tr(risingtime)3.Mp(overshooting)4.r(steadystateerror)步階圖時域響應判斷ts(settlingtime)→越短越好tr(risingtime)→越短越好Mp(overshooting)→越小越好r(steadystateerror)→越小越好開迴路頻域響應分析•Phasesmargin•Gainmargin•目的:–掌握系統動態響應,作為控制器設計之依據波德圖閉迴路頻域響應分析•共振峰值、共振頻率(控制器參數調整、濾波器設計之依據)•頻寬(頻寬越大表示系統響應越快剛性越佳)常見的時域與頻域響應PI控制器)11()(sTKsGiPC+=sKKsGIPC+=)(或PI控制器-頻率響應PD控制器sKKsGDPC+=)(PD控制器-頻率響應LEAD-LAG控制器pszsKGC++=0,,>pzK其中�如果為lead控制器�如果為lag控制器pz
LEAD-LAG控制器-響應LEAD控制器LAG控制器前饋控制器•目的:–補償系統因慣性或伺服落後造成之誤差使輸出更接近命令的要求→提升控制精度•缺點:–影響系統穩定性→容易造成振動Positioncommand以B1000V3A013為例:未使用前饋控制使用前饋控制二、工具機控制架構開迴路、半閉迴路、全閉迴路工具機控制架構-FANUC工具機控制架構-MITSUBISHI位置迴路速度迴路工具機控制架構-SIEMENS工具機控制架構-SIEMENS三、參數調整伺服部份•目標1.提升伺服系統性能2.系統穩定、沒有異音•常見名詞1.增益(gain)2.濾波器(filter)3.速度迴授控制、位置回授控制(feedbackcontrol)4.前饋控制器(feed-forwardcontrol)增益(Gain)PI控制器-調整Pgain主要功能:增加響應,縮短上升時間PI控制器-調整Igain主要功能:改善穩態誤差濾波器(filter)低通濾波器(low-passfilter)主要功能:消除高頻雜訊干擾Notchfilter主要功能:濾除指定頻率之頻寬使用後Bandrejectfilter伺服調整之影響以V500VGK012-X軸為例:伺服調整前伺服調整後運動控制部份•目標1.高速高精度2.表面平滑3.振動控制•常見名詞1.加減速時間常數、鐘形加減速、線性加減速2.補間、補間前後加減速3.轉角減速、依速度差減速4.多單節預讀5.Jerk控制加減速時間常數sTVamax=線性加減速...